题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
控制系统如题图所示,试作复合校正设计,使得(1)系统的超调量Mp<20%,确定前向增益值K。(2)设计
控制系统如题图所示,试作复合校正设计,使得

(1)系统的超调量Mp<20%,确定前向增益值K。
(2)设计输入补偿器Gr(s),使得该系统可以实现II型精度。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
控制系统如题图所示,试作复合校正设计,使得
(1)系统的超调量Mp<20%,确定前向增益值K。
(2)设计输入补偿器Gr(s),使得该系统可以实现II型精度。
如果结果不匹配,请 联系老师 获取答案
 更多“控制系统如题图所示,试作复合校正设计,使得(1)系统的超调量…”相关的问题
更多“控制系统如题图所示,试作复合校正设计,使得(1)系统的超调量…”相关的问题
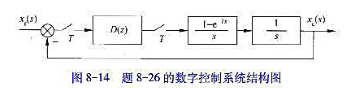
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
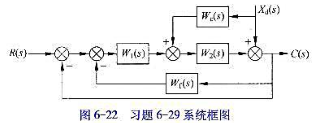
设复合控制系统的方框图如图6-22所示,其中 。试确定Wc(s)、W1(s)及K1使系统的输出完全不受扰动的影响,且单位阶跃响应的超调虽σ%=25%,调节时间tc=4s
。试确定Wc(s)、W1(s)及K1使系统的输出完全不受扰动的影响,且单位阶跃响应的超调虽σ%=25%,调节时间tc=4s
控制系统结构图如图6-2所示,其中 ,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
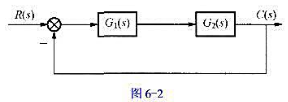
(1)画出校正后系统的结构图;
(2)确定位置反馈系数K;
(3)为了使校正后系统对于阶跃输入的稳态误差保持不变,K1应作何调整?
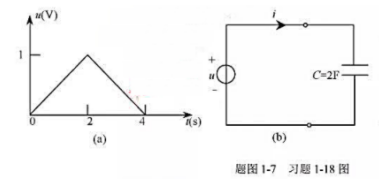
电压如题图 1-7(a)所示,施加于电容C如题图1-7(b)所示,试求i(t),并绘出波形图。
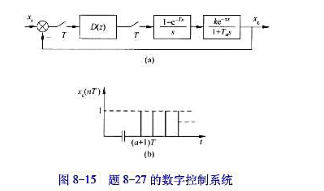
结构如图8-15(a)所示的数字控制系统。其中,τ-aT,a为正整数,T为采样周期。
试设计数字控制器D(z),使系统在单位阶跃输入作用下,输出量Xt(nT)满足图8-15(b)所示的波形。
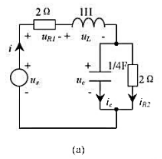
电路如题图5-3(a)所示。已知uc(t)=cos2tV,试求电源电压us(t)。分别绘出题图中所标出的所有电压和和所标出的所有电流的相量图。
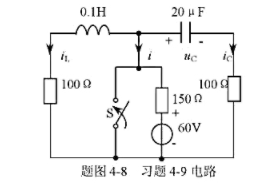
如题图4-8所示电路中,t=0时开关S闭合,在开关闭合前电路已处于稳态,求电流i(t)。
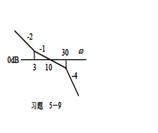
最小相位系统的开环频率特性如题图所示,
(a)试写出开环传递函数:
(b)用奈氏判据判别闭环系统的稳定性。