 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知线性空间R4的两个基为: (1) (2) 求由基(1)到基(2)的过渡矩阵,并求向量α=(1,0,0,1)的两组基下的坐
已知线性空间R4的两个基为:
 求由基(1)到基(2)的过渡矩阵,并求向量α=(1,0,0,1)的两组基下的坐标.
求由基(1)到基(2)的过渡矩阵,并求向量α=(1,0,0,1)的两组基下的坐标.
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知线性空间R4的两个基为:
求由基(1)到基(2)的过渡矩阵,并求向量α=(1,0,0,1)的两组基下的坐标.
如果结果不匹配,请 联系老师 获取答案
 更多“已知线性空间R4的两个基为: (1) (2) 求由基(1)到…”相关的问题
更多“已知线性空间R4的两个基为: (1) (2) 求由基(1)到…”相关的问题
(I)求复数域上线性空间V的线性变换 的特征值与特征向量,已知在一组基下的矩阵为:
的特征值与特征向量,已知在一组基下的矩阵为:
(II)在(I)中哪些变换的矩阵可以在适当的基下化成对角形?在可以化成对角形的情况,写出相应的基变换的过渡矩阵T,并验算T-1AT。
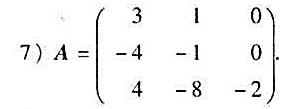
设ε1,ε2,ε3,ε4是四维线性空间V的一组基,线性变换 在这组基下的矩阵为
在这组基下的矩阵为
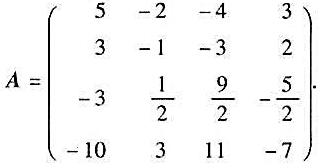
1)求在基
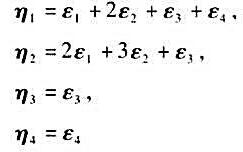
下的矩阵;
2)求的特征值与特征向量;
3)求一可逆矩阵T,使T-1AT成对角形。
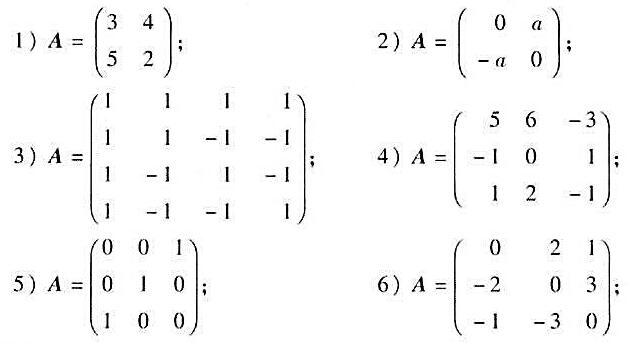
求下列线性变换在所指定基下的矩阵:
1)在P3中, ,
, 在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
2)[O,ε1,ε2]是平面上一直角坐标系,是平面上的向量对第一和第三象限角的平分线的垂直投影, 是平面上的向量对ε2的垂直投影,求
是平面上的向量对ε2的垂直投影,求 在基ε1,ε2下的矩阵;
在基ε1,ε2下的矩阵;
3)在空间P[x]n中,设变换为f(x)→f(x+1)-f(x)。求在基
下的矩阵;
4)六个函数
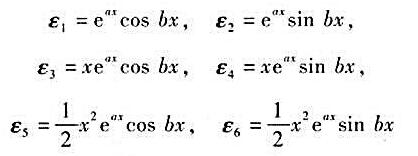
的所有实系数线性组合构成实数域上一个六维线性空间,求微分变换 在基εi(i=1,2,...,6)下的矩阵;
在基εi(i=1,2,...,6)下的矩阵;
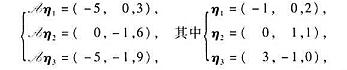
5)已知P3中线性变换在基η1=(-1,1,1),η2=(1,0,-1),η3=(0,1,1)下的矩阵是

求在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
6)在P3中,定义如下:
求在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
7)同上,求在η1,η2,η3下的矩阵。
设ε1,ε2,...,εn是线性空间V的一组基, 是V上的线性变换,证明:可逆当且仅当
是V上的线性变换,证明:可逆当且仅当 线性无关。
线性无关。
设R3中的两个基分别为:α1=(1,0,1)T,α2=(0,1,0)T,α3=(1,2,2)T和β1=(1,0,0)T,β2=(1,1,0)T,β3=(1,1,1)T。
(1)求由基α1,α2,α3到基β1,β2,β3的过渡矩阵。
(2)已知向量α在基α1,α2,α3下的坐标为(1,3,0)T,求α在基β1,β2,β3下的坐标。
已知线性规划的最优单纯形表如下:在不重新进行迭代的前提下,分别解决以下两个问题:(1)若第一个
已知线性规划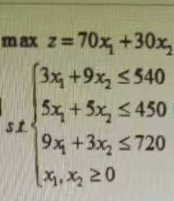 的最优单纯形表如下:
的最优单纯形表如下:
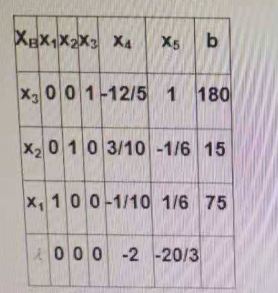
在不重新进行迭代的前提下,分别解决以下两个问题:
(1)若第一个约束中资源限量发生变化,为使原最优基不变,变化范围应为多少?
(2)若决策变量x2的价值系数发生变化,为使原最优基不变,变化范围应为多少?
设V和W都是数域F上的向量空间,且dimV=n。令σ是V到W的一个线性映射。我们如此选取V的一个基:α1,···,αs,αs+1,...,αn,使得α1,···,αs是Ker(σ)的一个基。证明:(i)σ(αs+1),...,σ(αn)组成Im(σ)的一个基;
(ii)dim Ker(σ)+dim Im(σ)=n。
 当且仅当集合{α1,α2,…,αn}
当且仅当集合{α1,α2,…,αn} {β1,β2,…,βm}
{β1,β2,…,βm}B.当且仅当向量组α1,α2,…,αn可以由向量组β1,β2,…,βm线性表示
C.当且仅当V的基都是W的基
D.当且仅当dimV≤dimW
在图所示的转子中,已知各偏心质量m1=10kg,m2=15kg,m3=20kg,m4=10kg,它们的回转半径分别为r1=40cm,r2=r4=30cm,r3=20cm,方位如图所示。若置于平衡基面Ⅰ及Ⅱ中的平衡质量mbⅠ及mbⅡ的回转半径均为50cm,试求mbⅠ及ⅢmbⅡ的大小和方位(l12=l23=l34)。

判别下面所定义的变换,哪些是线性的,哪些不是:
1)在线性空间V中, 其中α∈V是一固定的向量;
其中α∈V是一固定的向量;
2)在线性空间V中, 其中α∈V是一固定的向量;
其中α∈V是一固定的向量;
3)在P3中 ;
;
4)在P3中;
5)在P[x]中 ;
;
6)在P[x]中 ,其中x0∈P是一固定的数;
,其中x0∈P是一固定的数;
7)把复数域看作复数域上的线性空间,
8)在Pnxn中, ,其中B,C∈Pnxn是两个固定的矩阵。
,其中B,C∈Pnxn是两个固定的矩阵。







 生成的子空间的基和维数,并求子空间的一组标准正交基.其中:
生成的子空间的基和维数,并求子空间的一组标准正交基.其中:









