

 如果结果不匹配,请
如果结果不匹配,请 
 更多“单闭环控制系统中,受控量是()动量。”相关的问题
更多“单闭环控制系统中,受控量是()动量。”相关的问题
某最小相位系统结构如图6-7(a)所示,G0(s)为受控对象的传递函数,图6-7(b)所示为该系统的开环对数幅频特性渐近线。试求:
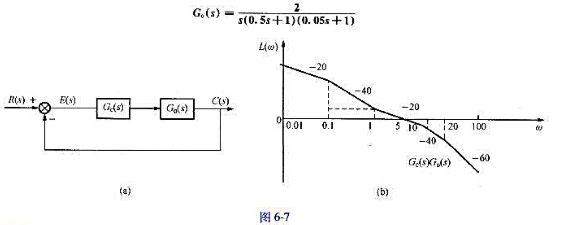
(1)写出开环传递函数;
(2)计算该控制系统的相角裕量;
(3)写出串联校正装置的传递函数Gc(s),说明是什么型式的校正。
在竖直上抛运动的向上运动阶段,下列关于动量和动量变化量(即变化后的动量减去变化前的动量)的说法中,正确的是()
A. 物体的动量方向向上,动量变化量的方向也向上
B. 物体的动量方向向上,动量变化量的方向向下
C. 物体的动量方向向下,动量变化量的方向向上
D. 物体的动量方向向下,动量变化量的方向也向下
周界/建筑出入口控制系统应根据受控区域的位置、通行对象及通行时间,设置相应的通行权限,通行记录至少应保存()天。
A.30
B.60
C.180
在受控定向造斜钻进中泵量一般采用()l/min为宜。
A.50~150
B.60~200
C.70~200
D.80~220。
开环控制系统和闭环控制系统的方块图相比最根本的差别是是否有()。
A.测量元件与变送器环节
B.反馈信号
C.被控对象
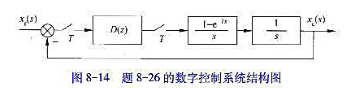
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
侧滑量是由滑板左右滑动的()。
A.移动量来表示
B.滑动来表示
C.位臵的大小来表示
D.滑动值来表示
A.活性碳罐的活性碳粒表面可以吸附汽油箱中的燃油蒸气
B.装有旁通阀的碳罐只有在发动机转速达到怠速以上时才进行净化
C.在发动机处于怠速或冷机工况下可以进行碳罐净化
D.蒸发排放控制系统中可以减少油箱蒸发排放物HC逃逸到大气中的量
反馈控制系统的开环传递函数为
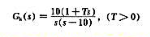
(1)画出系统开环幅相曲线的大致形状,并分别标出系统的稳定和不稳定时(-1, j0) 点的位置;
(2)由频率特性计算出闭环系统稳定时T的临界值。















