题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知单位反馈系统的开环传递函数为作该系统的波德图草图,并由奈氏判据确定是系统临界稳定的增益K
已知单位反馈系统的开环传递函数为

作该系统的波德图草图,并由奈氏判据确定是系统临界稳定的增益K值。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知单位反馈系统的开环传递函数为
作该系统的波德图草图,并由奈氏判据确定是系统临界稳定的增益K值。
如果结果不匹配,请 联系老师 获取答案
 更多“已知单位反馈系统的开环传递函数为作该系统的波德图草图,并由奈…”相关的问题
更多“已知单位反馈系统的开环传递函数为作该系统的波德图草图,并由奈…”相关的问题
已知一单位负反馈系统的开环传递函数为

(1)作系统的根轨迹图,并确定临界阻尼时的Kg值。
(2)求系统稳定的Kg值范围。
设单位负反馈系统的开环传递函数为
(1)绘制系统的根轨迹(不要求求出分离点);
(2)已知系统的一个闭环极点为-0.9,试求出其余的闭环极点;
(3)该系统是否可以用低阶系统来近似?若能,求出它的闭环传递函数,若不能,给出理由。
已知单位负反馈系统的开环传递函数为
(1)绘制Kg由0→∞变化时的根轨迹。
(2)求产生重根和纯虚根时的Kg值。
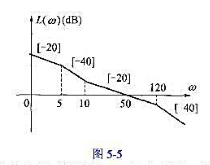
已知单位负反馈系统的开环传递函数G(s)无右半平面的零点和极点,且G(S)的对数渐近幅频特性曲线如图所示。试写出G(s)的表达式,并近似作出相频特性曲线,用对数频率稳定判据判断闭环系统的稳定性。
单位负反馈系统的开环传递函数为
试设计一个校正网络,使系统的相稳定裕度不小于45°,截止频率不低于50rad/s。
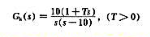
某最小相位系统结构如图6-7(a)所示,G0(s)为受控对象的传递函数,图6-7(b)所示为该系统的开环对数幅频特性渐近线。试求:
(1)写出开环传递函数;
(2)计算该控制系统的相角裕量;
(3)写出串联校正装置的传递函数Gc(s),说明是什么型式的校正。
反馈控制系统的开环传递函数为
(1)画出系统开环幅相曲线的大致形状,并分别标出系统的稳定和不稳定时(-1, j0) 点的位置;
(2)由频率特性计算出闭环系统稳定时T的临界值。







 试选择KK及T值以满足下列指标:
试选择KK及T值以满足下列指标: