题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知一单位反馈控制系统,其被控对象G0(s)和串联校正装置Gc(s)的对数幅频特性分别如图6-10(a)、(b)和(c)中L0
已知一单位反馈控制系统,其被控对象G0(s)和串联校正装置Gc(s)的对数幅频特性分别如图6-10(a)、(b)和(c)中L0和Lc所示。
(1)写出校正后各系统的开环传递函数;
(2)分析各Gc(s)对系统的作用,并比较其优缺点。

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知一单位反馈控制系统,其被控对象G0(s)和串联校正装置Gc(s)的对数幅频特性分别如图6-10(a)、(b)和(c)中L0和Lc所示。
(1)写出校正后各系统的开环传递函数;
(2)分析各Gc(s)对系统的作用,并比较其优缺点。
如果结果不匹配,请 联系老师 获取答案
 更多“已知一单位反馈控制系统,其被控对象G0(s)和串联校正装置G…”相关的问题
更多“已知一单位反馈控制系统,其被控对象G0(s)和串联校正装置G…”相关的问题
有单位反馈的火炮指挥仪伺服系统,其开环传递函数为:G(s)=K/{s(0.2s+1)(0.5s+1)},若要求系统最大输出速度为12°/s,输出位置的容许误差小于2°,试求 :
1、确定满足上述指标的小K值,计算该K值下系统的相角裕度和幅值裕度
2、在前向通路中串接超前校正网络G0(s)=(0.4s+1)/(0.08s+1)
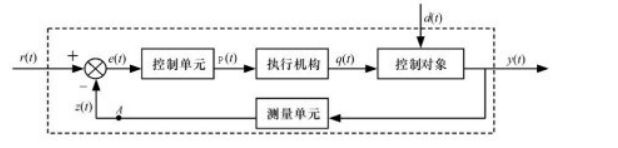
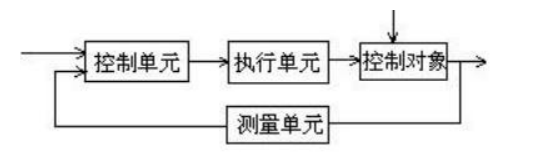
开环控制系统和闭环控制系统的方块图相比最根本的差别是是否有()。
A.测量元件与变送器环节
B.反馈信号
C.被控对象
A.运算
B.转换
C.放大
D.输出
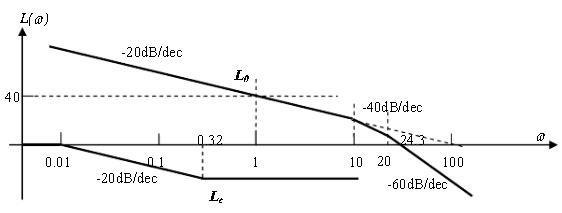
已知单位反馈最小相位系统的开环对数幅频特性L0(ω)和串联校正装置的对数幅频特性Lc(ω)如图6-17所示。原系统的幅值穿越频率为24.3rad/s:
1、 写出原系统的开环传递函数G0(s),并求其相角裕度y0,判断系统的稳定性;
2、 写出校正装置的传递函数G0(s);
3、写出校正后的开环传递函数G0(s)Gc(s),画出校正后系统的开环对数幅频特性LGC(ω),并用劳斯判据判断系统的稳定性。
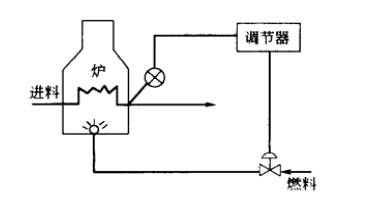
A.其目得就是为了使调节器、调节阀、对象三个环节组合起来,在控制系统中实现负反馈作用
B.在复杂控制系统中,各调节器得正反作用不一定相同
C.操纵变量增加,被控变量也增加得称为“正作用”调节器
D.调节器得输出信号随偏差得增加而增加得称为“正作用”调节器