

 如果结果不匹配,请
如果结果不匹配,请 
 更多“求limx→1(1-x2)tan πx/2”相关的问题
更多“求limx→1(1-x2)tan πx/2”相关的问题
设某LSI因果系统的频率响应为H(ejm).
(1)若

用解析方法求该系统的单位冲激响应.采用IDFT(IFFT)作为计算工具,验证所得结果,并选择合适的计算长度点数N。
(2)若 且有
且有
用解析方法求此系统的单位冲激响应h(n).采用IDFT(IFFT)作为计算工具,验证所得结果.并选择合适的计算长度点数N.
某系统原始方程如下:
试绘制系统方框图,并求扰动输入n(t)=(t+2)·1(t)、给定输入r(t)=[2t+3+0.5cos(2t+15°)]+1(t)时,系统的总稳态误差em(1)。
离散系统结构图如图所示,采样周期T=0.2s。
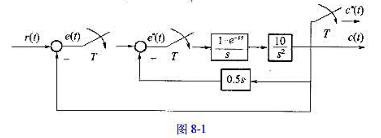
(1)判断系统的稳定性;
(2)当r(t)=t时,求系统的稳态误差e*(∞)。
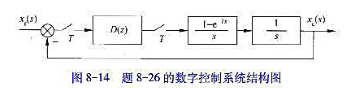
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
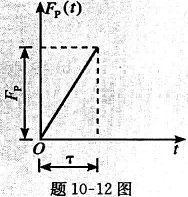
设有一个自振周期为T的单自由度体系,承受图示突加荷载作用。试:
(1)求任意时刻t的位移y(t).
(2)证明:当τ<0.5T时,最大位移发生在时刻t>τ(即卸载后);当t>0.5T时,最大位移发生在t<τ(即卸载前).
(3)当τ=0.1T,τ=0.2T,τ=0.3T,τ=0.5T时,求最大位移ymax与静位移 的比值。
的比值。
(4)证明: 的最大值为2;当τ<0.1T时,可按瞬时冲量计算,误差不大。 分析 t为荷载持续时间,τ为积分变量。
的最大值为2;当τ<0.1T时,可按瞬时冲量计算,误差不大。 分析 t为荷载持续时间,τ为积分变量。
设ε1,ε2,ε3,ε4是四维线性空间V的一组基,线性变换 在这组基下的矩阵为
在这组基下的矩阵为
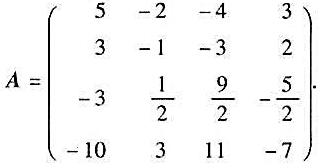
1)求在基
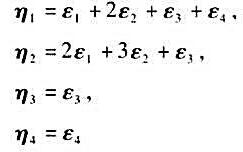
下的矩阵;
2)求的特征值与特征向量;
3)求一可逆矩阵T,使T-1AT成对角形。
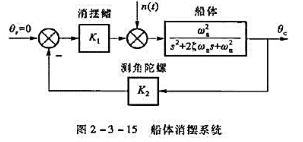
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
Y=(1-x2)2的导数是()
A.2-2x2
B.2x2-2
C.4x3-4x
D.4x-4x3















