

 如果结果不匹配,请
如果结果不匹配,请 
 更多“根轨迹的分离、会合点位于()。”相关的问题
更多“根轨迹的分离、会合点位于()。”相关的问题

第3题
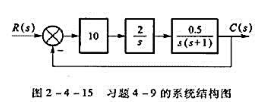
控制系统如图4-29所示,其中(1)当Wc=kg时,由所绘制的根轨迹证明系统总是不稳定的。(2)
控制系统如图4-29所示,其中
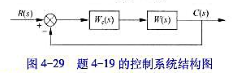
(1)当Wc=kg时,由所绘制的根轨迹证明系统总是不稳定的。
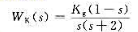
(2)当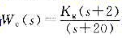 时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
第4题
已知单位负反馈系统的开环传递函数为(1)绘制Kg由0→∞变化时的根轨迹。(2)求产生重根和纯虚
已知单位负反馈系统的开环传递函数为
(1)绘制Kg由0→∞变化时的根轨迹。
(2)求产生重根和纯虚根时的Kg值。
第7题
已知一单位负反馈系统的开环传递函数为(1)作系统的根轨迹图,并确定临界阻尼时的Kg值。(2)
已知一单位负反馈系统的开环传递函数为

(1)作系统的根轨迹图,并确定临界阻尼时的Kg值。
(2)求系统稳定的Kg值范围。
第9题
已知系统的开环传递函数为试采用根轨迹法设计微分校正装置Ge(G),使得系统的超调量Mp<20%,过波时
已知系统的开环传递函数为

试采用根轨迹法设计微分校正装置Ge(G),使得系统的超调量Mp<20%,过波时间
ts<4秒,井比较校正前后系统的稳态性能。
第10题
设单位负反馈系统的开环传递函数为(1)绘制系统的根轨迹(不要求求出分离点);(2)已知系统的一个
设单位负反馈系统的开环传递函数为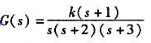
(1)绘制系统的根轨迹(不要求求出分离点);
(2)已知系统的一个闭环极点为-0.9,试求出其余的闭环极点;
(3)该系统是否可以用低阶系统来近似?若能,求出它的闭环传递函数,若不能,给出理由。















