

 如果结果不匹配,请
如果结果不匹配,请 
 更多“求u=xyz在点M(1,1,1),沿1=(2,-1,3)的方…”相关的问题
更多“求u=xyz在点M(1,1,1),沿1=(2,-1,3)的方…”相关的问题
将右手直角坐标系σ1={O;e1,e2,e3}绕方向v=(1,1,1)右旋 ,原点不动,得坐标系
,原点不动,得坐标系 ,求σ1到σ2的点的坐标变换公式.
,求σ1到σ2的点的坐标变换公式.
求 在(1,1)处沿方向1=(cosα,sina)的方向导数.并进一步求:
在(1,1)处沿方向1=(cosα,sina)的方向导数.并进一步求:
(1)在哪个方向上其导数有最大值;
(2)在哪个方向上其导数有最小值;
(3)在哪个方向上其导数为0;
(4)求u的梯度.
求下列各平面的方程。
(1)过点(2,-1,3)且以{-2,1,1}为法向量;
(2)过点(4,-3,1)且垂直于y轴;
(3)过点(3,0,-1)且与平面3x-7y+5z-12=0平行;
(4)过点(1,-1,1)且与两平面x-y+z-1=0和2x+y+z-1=0垂直;
(5)过点(5,0,0)、(0,-1,0)且平行于z轴;
(6)过点(1,1,1)、(2,2,2)且与平面x+y-z=0垂直;
(7)过三点(0,0,0)、(1,1,1)、(2,-1,4);
(8)过点(1,1,-1)且平行于向量 ={1,2,1}与
={1,2,1}与 ={2,1,1}。
={2,1,1}。
 ,其中
,其中 求u的梯度,并指出在空间的哪些点上|gradu|=1。
求u的梯度,并指出在空间的哪些点上|gradu|=1。 时的速度和加速度。
时的速度和加速度。
求下列线性变换在所指定基下的矩阵:
1)在P3中, ,
, 在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
2)[O,ε1,ε2]是平面上一直角坐标系,是平面上的向量对第一和第三象限角的平分线的垂直投影, 是平面上的向量对ε2的垂直投影,求
是平面上的向量对ε2的垂直投影,求 在基ε1,ε2下的矩阵;
在基ε1,ε2下的矩阵;
3)在空间P[x]n中,设变换为f(x)→f(x+1)-f(x)。求在基
下的矩阵;
4)六个函数
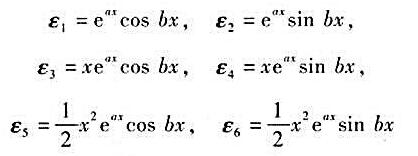
的所有实系数线性组合构成实数域上一个六维线性空间,求微分变换 在基εi(i=1,2,...,6)下的矩阵;
在基εi(i=1,2,...,6)下的矩阵;
5)已知P3中线性变换在基η1=(-1,1,1),η2=(1,0,-1),η3=(0,1,1)下的矩阵是

求在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
6)在P3中,定义如下:
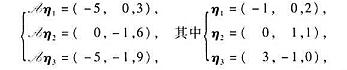
求在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
7)同上,求在η1,η2,η3下的矩阵。















