题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
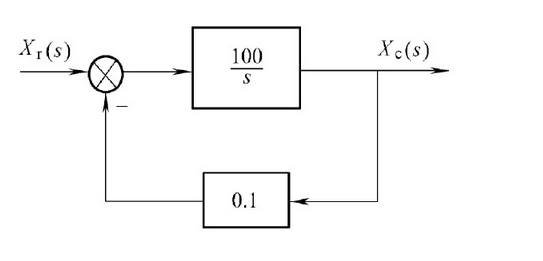
一阶系统结构图如下图所示。要求系统闭环增益KΦ=2,调节时间ts≤0.4s,试确定参数K1与K2的值。
一阶系统结构图如下图所示。要求系统闭环增益KΦ=2,调节时间ts≤0.4s,试确定参数K1与K2的值。

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
一阶系统结构图如下图所示。要求系统闭环增益KΦ=2,调节时间ts≤0.4s,试确定参数K1与K2的值。
如果结果不匹配,请 联系老师 获取答案
 更多“一阶系统结构图如下图所示。要求系统闭环增益KΦ=2,调节时间…”相关的问题
更多“一阶系统结构图如下图所示。要求系统闭环增益KΦ=2,调节时间…”相关的问题
一阶系统的结构图如下图所示。试求该系统单位阶跃响应及调节时间ts。如果要求ts≤0.1s,试问系统的反馈系数Kf应该如何选取?
e
(z),及系统的单位阶跃响应c(t)。
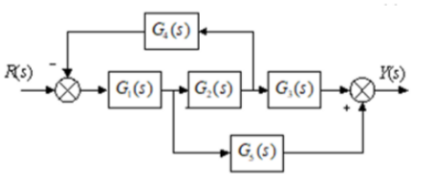
某系统其结构图和开环幅相特性曲线如图2-5-20(a),(b)所示。图中
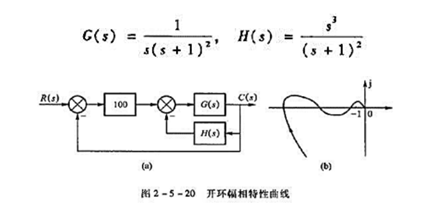
试判断闭环系统的稳定性,并确定闭环特征方程正实部根的个数。
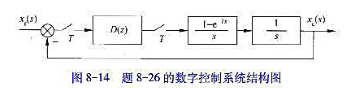
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
已知单位反馈系统的结构图如题图所示,其中K为前向增益, 为超前校正装置,T1>T2试用频率法确定使得系统具有最大相位裕度的增益K值。
为超前校正装置,T1>T2试用频率法确定使得系统具有最大相位裕度的增益K值。

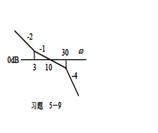
最小相位系统的开环频率特性如题图所示,
(a)试写出开环传递函数:
(b)用奈氏判据判别闭环系统的稳定性。
两反馈放大电路分别如下图所示。
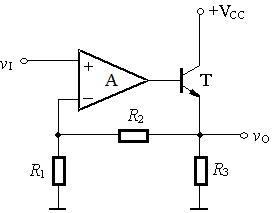
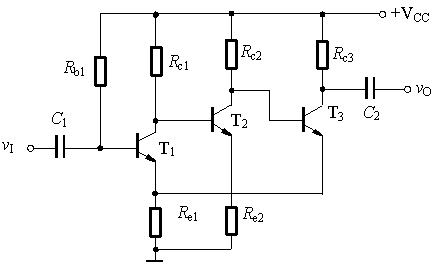
(1)试判断各电路的反馈极性和组态;
(2)求各电路的闭环电压增益AVF=vo/vi表达式。
有一输水管系统如下图所示,出水口处管子直径为Φ55x2.5mm,设管路的压头损失为16u²/2(u指出水管的水流速,未包括出口损失)。求水的流量为多少m3/h?由于工程上的需要,要求水流量增加20%,此时,应将水箱的水面升高多少m?假设管路损失仍可以用16u²/2(u指出水管的水流速,未包括出口损失)表示。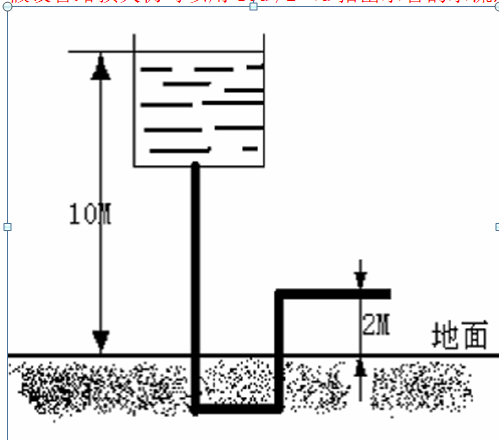
控制系统结构图如图6-2所示,其中 ,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
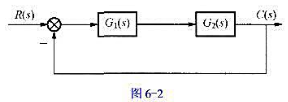
(1)画出校正后系统的结构图;
(2)确定位置反馈系数K;
(3)为了使校正后系统对于阶跃输入的稳态误差保持不变,K1应作何调整?