 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
在下列关于挠度、转角正负号的概念中,()是正确的。A 转角的正负号与坐标系有关,挠度的正负号与
在下列关于挠度、转角正负号的概念中,()是正确的。
A 转角的正负号与坐标系有关,挠度的正负号与坐标系无关
B 转角的正负号与坐标系无关,挠度的正负号与坐标系有关
C 转角和挠度的正负号均与坐标系有关
D 转角和挠度的正负号均与坐标系无关
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在下列关于挠度、转角正负号的概念中,()是正确的。
A 转角的正负号与坐标系有关,挠度的正负号与坐标系无关
B 转角的正负号与坐标系无关,挠度的正负号与坐标系有关
C 转角和挠度的正负号均与坐标系有关
D 转角和挠度的正负号均与坐标系无关
如果结果不匹配,请 联系老师 获取答案
 更多“在下列关于挠度、转角正负号的概念中,()是正确的。A 转角的…”相关的问题
更多“在下列关于挠度、转角正负号的概念中,()是正确的。A 转角的…”相关的问题
座处的转角。
如题下图,悬臂梁模型构件受集中力作用产生变形,已知梁长LBA=lm,支座B.在荷载作用下的沉降量△B=0.2mm,转角B.=0.01°(以顺时针转向为正),A点竖向位移测量值△A=4.13mm,求悬臂梁在A.点的挠度(小数点后保留两位)()。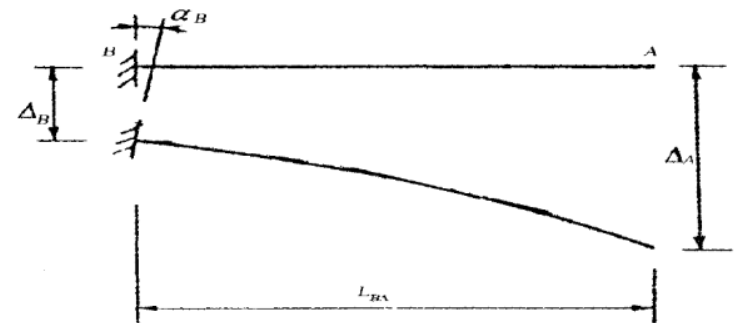
A.1.97mm
B.1.88mm
C.3.93mm
D.3.76mm
如题下图,悬臂梁模型构件受集中力作用产生变形,已知梁长LBA=lm,支座B.在荷载作用下的沉降量△B=0.2mm,转角B.=0.01°(以顺时针转向为正),A点竖向位移测量值△A=4.13mm,求悬臂梁在A.点的挠度(小数点后保留两位)()。
A.1.97mm
B.1.88mm
C.3.93mm
D.3.76mm
如题下图,悬臂梁模型构件受集中力作用产生变形,已知梁长LBA=lm,支座B.在荷载作用下的沉降量△B=0.2mm,转角B.=0.01°(以顺时针转向为正),A点竖向位移测量值△A=4.13mm,求悬臂梁在A.点的挠度(小数点后保留两位)()。
A.1.97mm
B.1.88mm
C.3.93mm
D.3.76mm







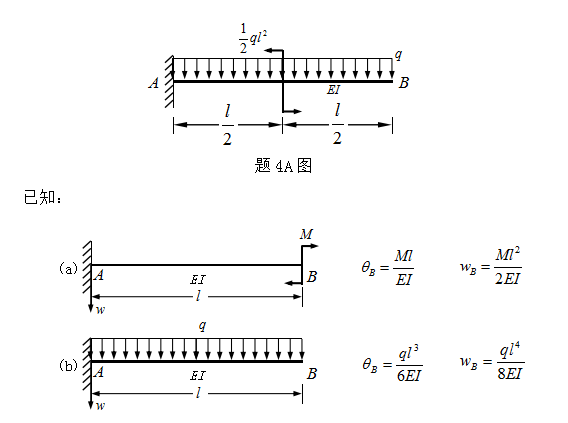
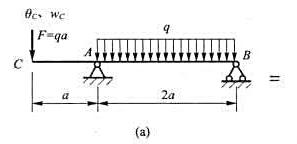
 ,转角为
,转角为 ,则图(b)所示梁的C截面的转角为______。
,则图(b)所示梁的C截面的转角为______。









