的表达式,并求其间断点.
的表达式,并求其间断点.
 如果结果不匹配,请
如果结果不匹配,请 
 更多“求的表达式,并求其间断点.”相关的问题
更多“求的表达式,并求其间断点.”相关的问题
第1题
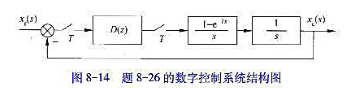
数字控制系统结构图如图8-14所示,采样周期T=1s。(1)试求未校正系统的闭环极点,并判断其稳定性。
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。

第5题
JO2-824三相感应电动机,PN=40kW,UN=380V,IN=75A,定子绕组采用三角形联接,双层叠
绕组,4极,48槽,n=10槽,每极导体数为22,a=2,试求:
点击查看答案
(1)计算脉振磁动势基波和3、5、7等次谐波的振幅,并写出各相基波脉振磁动势的表达式
(2)当B相电流为最大值时,写出各相基波磁动势的表达式
(3)计算三相合成磁动势基波及5、7、11次谐波的幅值,并说明各次谐波的转向、极对数和转速
(4)写出三相合成磁动势的基波及5、7、11次谐波的表达式
(5)分析基波和5、7、11次谐波的绕组系数值,说明采用短距和分布绕组对磁动势波形有什么影响
第6题
设f(x)=g1(x).g2(x),其中g1(x), g2(x)在(-∞,+∞)内满足条件且.(1)求f(x)所满
设f(x)=g1(x).g2(x),其中g1(x), g2(x)在(-∞,+∞)内满足条件 且
且 .
.
(1)求f(x)所满足的一阶微分方程
(2)求出f(x)的表达式
 的简化表达式为().
的简化表达式为().第9题
图6.2(a)表示MDS图,请画出对应的ASM流程图,并采用链接式的if-then-else语句写出它们的表达式.
图6.2(a)表示MDS图,请画出对应的ASM流程图,并采用链接式的if-then-else语句写出它们的表达式.

第11题
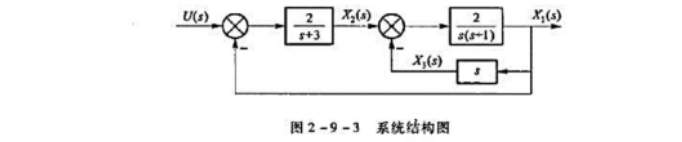
列写出如图2-9-3所示系统的状态方程表达式(取图中X1、X2和X3作为状态变最),并试确
列写出如图2-9-3所示系统的状态方程表达式(取图中X1、X2和X3作为状态变最),并试确定该系统是否完全可控和完全可观测。