题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设矩阵矩阵B(E+A)k,其中k为实数,E为单位矩阵,求对角矩阵A,使B与A相似;并求k是为何值时,为正定
设矩阵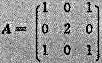 矩阵B(E+A)k,其中k为实数,E为单位矩阵,求对角矩阵A,使B与A相似;并求k是为何值时,为正定矩阵
矩阵B(E+A)k,其中k为实数,E为单位矩阵,求对角矩阵A,使B与A相似;并求k是为何值时,为正定矩阵
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设矩阵矩阵B(E+A)k,其中k为实数,E为单位矩阵,求对角矩阵A,使B与A相似;并求k是为何值时,为正定矩阵
如果结果不匹配,请 联系老师 获取答案
 更多“设矩阵矩阵B(E+A)k,其中k为实数,E为单位矩阵,求对角…”相关的问题
更多“设矩阵矩阵B(E+A)k,其中k为实数,E为单位矩阵,求对角…”相关的问题
用Eij表示i行j列的元素为1,而其余元素全为零的nxn矩阵,A=(aij)nxn。证明:
1)如果AE12=E12A,那么当k≠1时ak1=0,当k≠2时a2k=0;
2)如果AEij=EijA,那么当k≠i时aki=0,当k≠j时ajk=0,且aii=ajj;
3)如果A与所有的n级矩阵可交换,那么A一定是数量矩阵,即A=aE。
求下列线性变换在所指定基下的矩阵:
1)在P3中, ,
, 在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
2)[O,ε1,ε2]是平面上一直角坐标系,是平面上的向量对第一和第三象限角的平分线的垂直投影, 是平面上的向量对ε2的垂直投影,求
是平面上的向量对ε2的垂直投影,求 在基ε1,ε2下的矩阵;
在基ε1,ε2下的矩阵;
3)在空间P[x]n中,设变换为f(x)→f(x+1)-f(x)。求在基
下的矩阵;
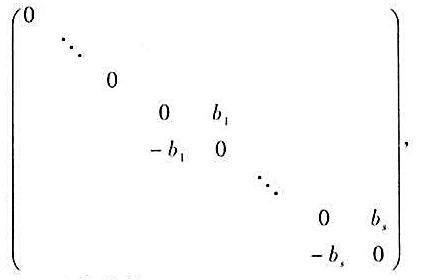
4)六个函数
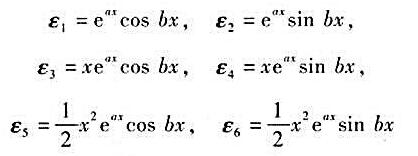
的所有实系数线性组合构成实数域上一个六维线性空间,求微分变换 在基εi(i=1,2,...,6)下的矩阵;
在基εi(i=1,2,...,6)下的矩阵;
5)已知P3中线性变换在基η1=(-1,1,1),η2=(1,0,-1),η3=(0,1,1)下的矩阵是

求在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
6)在P3中,定义如下:
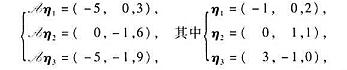
求在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
7)同上,求在η1,η2,η3下的矩阵。
 ,其中,常数k>0,则称τ是同位相似(或相似),称O为位似中心,k称为位似系数.
,其中,常数k>0,则称τ是同位相似(或相似),称O为位似中心,k称为位似系数.(1)适当选取标架,求出位似τ的公式;
(2)证明位似是仿射变换:
(3)证明位似保持角度不变;
(4)证明位似可以分解成某两个伸缩的乘积.
设A为三阶矩阵,a1,a2为A的分别属于特征值-1,1的特征向量,向量a3满足
(1)证明a1,a2,a3线性无关;
(2)令P=(a1,a2,a3),求P-1AP。
设ε1,ε2,ε3,ε4是四维线性空间V的一组基,线性变换 在这组基下的矩阵为
在这组基下的矩阵为
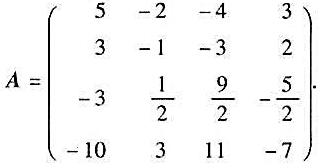
1)求在基
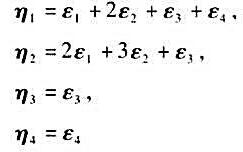
下的矩阵;
2)求的特征值与特征向量;
3)求一可逆矩阵T,使T-1AT成对角形。