题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
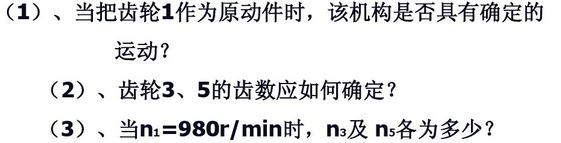
下图所示为-3K型行星传动,已知z1=14,z2=14,z3=40,z4=42,m=2mm。轮1、2、4为标准齿轮。求i14轮3的变位系数,各齿
下图所示为-3K型行星传动,已知z1=14,z2=14,z3=40,z4=42,m=2mm。轮1、2、4为标准齿轮。求i14轮3的变位系数,各齿轮分度圆和节圆的大小。并问:该轮系是否满足均布安装条件?轮2有几个节圆?

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
下图所示为-3K型行星传动,已知z1=14,z2=14,z3=40,z4=42,m=2mm。轮1、2、4为标准齿轮。求i14轮3的变位系数,各齿轮分度圆和节圆的大小。并问:该轮系是否满足均布安装条件?轮2有几个节圆?
如果结果不匹配,请 联系老师 获取答案
 更多“下图所示为-3K型行星传动,已知z1=14,z2=14,z3…”相关的问题
更多“下图所示为-3K型行星传动,已知z1=14,z2=14,z3…”相关的问题
下图所示放大电路为射极输出器,已知UCC=12V,RB=110kΩ,RE=3kΩ,RL=3kΩ,三极管UBE=0.6V,β=100。各电容足够大,求(1)带负载和空载两种情况下的电压放大倍数(2)输入电阻和输出电阻。

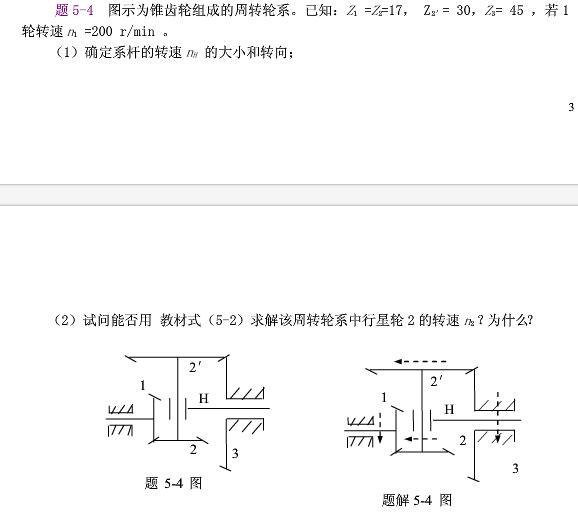
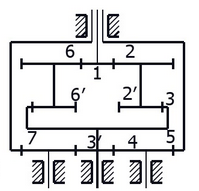
在下图所示的轮系中,设各轮的模数均相同,且为标准传动,若已知z1=z2'=z3'=z6'=20、z2=z4=z6=z7=40。试问:
在图6-14所示操舵装置的周转轮系中,已知齿数z1=z4.(1)自动操舵时刹住舵轮A,这时复式电动机开动,执行电动机再通过行星轮系1-2-3-4-5及一些其他机构进行操舵,求传动比i15;(2)手动操舵时用控制杆锁住复式电动机,故轮1不动,这时松开舵轮A,并用它通过行星轮系4-3-2-1-5及一些其他机构进行操舵,求传动比i45.
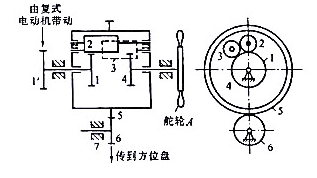
图6-14
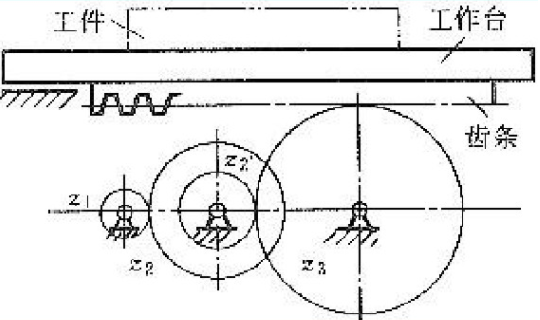
如下图所示为一机床工作台的传动系统。设已知各齿轮的齿数,齿轮3的分度圆半径r3,各齿轮的转动惯量J1,J2,J2',J3,齿轮1直接装在电动机轴上,故J1中包含了电动机转子的转动惯量;工作台和被加工零件的重量之和为G。当取齿轮1为等效构件时,求该机械系统的等效转动惯量Je(ω1/ω2=z2/z1)。
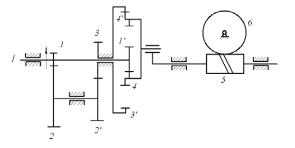
已知轮系中各轮齿数z1'=15,z4'=30,z4=45,z3'=60,z3=25,z2'=20,z2=25,z1=20,z5=1,z6=40,轴Ⅰ转速n1=1000r/min,转向如下图所示,求蜗轮6的转速和转向。
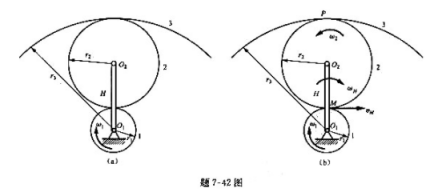
行星齿轮减速机构如题7-42图(a)所示。太阳轮1绕O1转动,带动行星轮2沿固定齿圈3滚动,行星轮2带动系杆H绕轴OH转动,从而实现了变速要求。已知各齿轮节圆半径分别为r1,r2。以及r3=r1+2r2,齿轮1和2的齿数分别为z1和z2,当齿轮1以角速度w1转动时,试求系杆角速度wH,以及传动比iH。
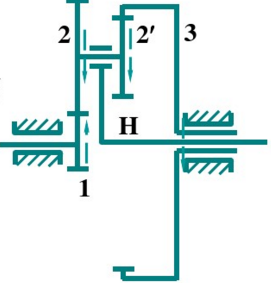
在图所示的行星轮系中,各轮齿数分别为Z1=15,Z2=25,Z2'=20,Z3=60,已知n1=200r/min,n3=50r/min,转向见图。试求行星架H的转速。
下图所示为一蜗杆-圆柱斜齿轮-直齿锥齿轮三级传动,已知蜗杆为主动,且按图示方向转动。试在图中绘出:
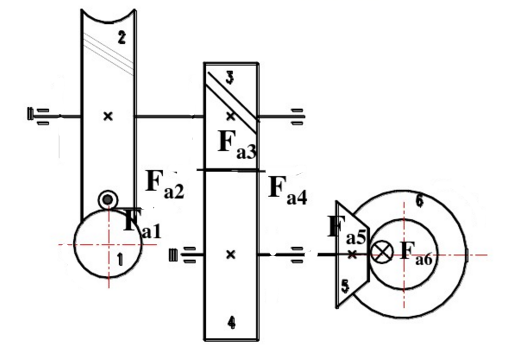
(1)各轮转向。
(2)使Ⅱ、Ⅲ轴轴承所受轴承向力较小时的斜齿轮轮齿的旋向。
(3)斜齿轮3、4在啮合点所受各分力Ft3、Fr3、Fa3及Ft4、Fr4、Fa4的方向。
在下图所示轮系中,已知n1=200r/min,z1=20,z3=80,z4=42,z7=40。z5=18,z620,试求轮3的转速n3。