 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
求积分的值,其中C为:(1)负向单位圆周:|z|=1;(2)正向单位圆周:|z-2|=1.
求积分 的值,其中C为:
的值,其中C为:
(1)负向单位圆周:|z|=1;
(2)正向单位圆周:|z-2|=1.
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
求积分的值,其中C为:
(1)负向单位圆周:|z|=1;
(2)正向单位圆周:|z-2|=1.
如果结果不匹配,请 联系老师 获取答案
 更多“求积分的值,其中C为:(1)负向单位圆周:|z|=1;(2)…”相关的问题
更多“求积分的值,其中C为:(1)负向单位圆周:|z|=1;(2)…”相关的问题
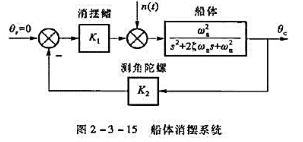
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
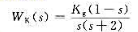
已知一单位负反馈系统的开环传递函数为

(1)作系统的根轨迹图,并确定临界阻尼时的Kg值。
(2)求系统稳定的Kg值范围。
已知单位负反馈系统的开环传递函数为
(1)绘制Kg由0→∞变化时的根轨迹。
(2)求产生重根和纯虚根时的Kg值。
(1)两齿轮的模数m和基圆周节pb1、Pb2;
(2)两齿轮的变位系数x1、x2,且属何种传动类型;
(3)两齿轮的齿根圆半径rf1、rf2和齿顶圆半径ra1、ra2;
(4)按比例画出两齿轮啮合原理图,在图上标注出理论啮合线 和实际啮合线
和实际啮合线 ,并由图上量取长度,计算重合度ε;
,并由图上量取长度,计算重合度ε;
(5)判断齿轮是否有根切,为什么?
注:无侧隙啮合方程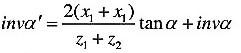
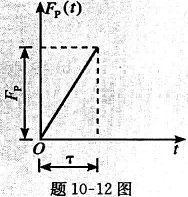
设有一个自振周期为T的单自由度体系,承受图示突加荷载作用。试:
(1)求任意时刻t的位移y(t).
(2)证明:当τ<0.5T时,最大位移发生在时刻t>τ(即卸载后);当t>0.5T时,最大位移发生在t<τ(即卸载前).
(3)当τ=0.1T,τ=0.2T,τ=0.3T,τ=0.5T时,求最大位移ymax与静位移 的比值。
的比值。
(4)证明: 的最大值为2;当τ<0.1T时,可按瞬时冲量计算,误差不大。 分析 t为荷载持续时间,τ为积分变量。
的最大值为2;当τ<0.1T时,可按瞬时冲量计算,误差不大。 分析 t为荷载持续时间,τ为积分变量。
设某产品的总利润为

其中x(百台)为产量.
(1)求产址等于多少时总利润最大?
(2)在利润最大时,再生产200台,总利润增加多少?







 的值,其中C为以a为中心r为半径的圆周.
的值,其中C为以a为中心r为半径的圆周. ,其中
,其中 与圆锥面
与圆锥面 围成的区域;
围成的区域; 与
与 的公共部分.
的公共部分. D为上半圆周
D为上半圆周 与直线y=±x围成的圆扇形.
与直线y=±x围成的圆扇形. =().
=().








