 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
画一个半径是1000,圆心位置是(1500,1500)的圆,正确的VB语句是()
A.ircle (1500,1500):1500
B.ircle (1500,1500):1000
C.ircle (1500,1500),1000
D.ircle (1500,1500)
 答案
答案
A、ircle (1500,1500):1500
 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.ircle (1500,1500):1500
B.ircle (1500,1500):1000
C.ircle (1500,1500),1000
D.ircle (1500,1500)
答案
A、ircle (1500,1500):1500
如果结果不匹配,请 联系老师 获取答案
 更多“画一个半径是1000,圆心位置是(1500,1500)的圆,…”相关的问题
更多“画一个半径是1000,圆心位置是(1500,1500)的圆,…”相关的问题
,(),(),(),(),()。马自达标准中,PL=1指只要机器人TCP点经过以示教点为圆心、以()为半径的圆内的任一点即视为达到;PL=2指只要机器人TCP点经过以示教点为圆心、以()为半径的圆内的任一点即视为达;PL=3指只要机器人TCP点经过以示教点为圆心、以()为半径的圆内的任一点即视为达到。
A.点A在☉O内部
B.点A在☉O上
C.点A在☉O外部
D.点A不在☉O上
,凸轮绕轴心O逆时针方向转动, =25 mm,滚子半径
=25 mm,滚子半径 =10 mm,求:①凸轮的理论廓线;②凸轮的基圆半径
=10 mm,求:①凸轮的理论廓线;②凸轮的基圆半径 ;③从动件行程h;④图示位置的压力角。(提示:需绘图标示出来,绘图需注明比例尺)
;③从动件行程h;④图示位置的压力角。(提示:需绘图标示出来,绘图需注明比例尺)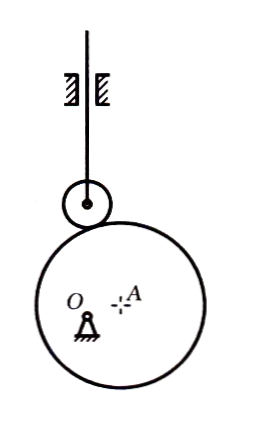
A.满1000减80 满1500减120 满2000减160 满3000减240 满4000减400 (仅部分型号参与),3-5/满2000减100 满3000减150 满4000减200 满5000减250,1
B.满1000减100 满1500减150 满2000减200 满3000减300 满4000减400,3-5/满2000减100 满3000减150 满4000减200 满5000减250,1
C.满2000减100 满3000减150 满4000减200 满5000减250,1-3/满2000减100 满3000减150 满4000减200 满5000减250,2
D.满1000减100 满1500减150 满2000减200 满3000减300 满4000减400,1-3/满2000减100 满3000减150 满4000减200 满5000减250,2
A.以点o为圆心,以任意长为半径画弧,两弧交∠AOB两边于点M,N
B.分别以点M,N为圆心,以大于1/2MN的长度为半径画弧,两弧交于点P
C.作射线OP
D.射线OP即为∠AOB的角平分线
















