

 如果结果不匹配,请
如果结果不匹配,请 
 更多“对于控制系统用衰减比表征系统的稳定性,调整时间表征系统调节的…”相关的问题
更多“对于控制系统用衰减比表征系统的稳定性,调整时间表征系统调节的…”相关的问题
第1题
热惰性指标(D)是表征围护结构对温度波衰减快慢程度的无量纲指标。D值越大,围护结构的热稳定性
热惰性指标(D)是表征围护结构对温度波衰减快慢程度的无量纲指标。D值越大,围护结构的热稳定性越差。()
第2题
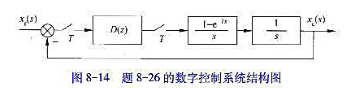
数字控制系统结构图如图8-14所示,采样周期T=1s。(1)试求未校正系统的闭环极点,并判断其稳定性。
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
第3题
控制系统如题图所示,试作复合校正设计,使得(1)系统的超调量Mp<20%,确定前向增益值K。(2)设计
控制系统如题图所示,试作复合校正设计,使得

(1)系统的超调量Mp<20%,确定前向增益值K。
(2)设计输入补偿器Gr(s),使得该系统可以实现II型精度。
第4题
设复合控制系统的方框图如图6-22所示,其中。试确定Wc(s)、W1(s)及K1使系统的输出完
设复合控制系统的方框图如图6-22所示,其中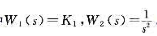 。试确定Wc(s)、W1(s)及K1使系统的输出完全不受扰动的影响,且单位阶跃响应的超调虽σ%=25%,调节时间tc=4s
。试确定Wc(s)、W1(s)及K1使系统的输出完全不受扰动的影响,且单位阶跃响应的超调虽σ%=25%,调节时间tc=4s

第7题
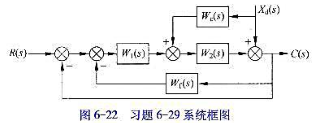
控制系统结构图如图6-2所示,其中,为了减少时间常数T2的影响,提高系统快速性,现采用位置反
控制系统结构图如图6-2所示,其中 ,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
(1)画出校正后系统的结构图;
(2)确定位置反馈系数K;
(3)为了使校正后系统对于阶跃输入的稳态误差保持不变,K1应作何调整?
第8题
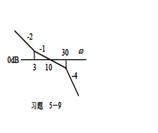
最小相位系统的开环频率特性如题图所示,(a)试写出开环传递函数:(b)用奈氏判据判别闭环系统的稳定
最小相位系统的开环频率特性如题图所示,
(a)试写出开环传递函数:
(b)用奈氏判据判别闭环系统的稳定性。
第9题
泥水式顶管机主要包括主机、后顶装置、泥水平衡系统、泥水处理系统和电气控制系统,下列描述不正确
的是()
点击查看答案
A.后顶装置的主要功能是完成管节的顶进。
B.泥水处理系统主要功能是通过泥水处理设备的处理,将泥水的比例和粘度调整到一定值,通过泵将其送至顶管机中使用,同时将排泥管排放的泥水进行分离。
C.主机的功能是通过加压的泥水来平衡开挖面的土体(平衡地下水水压力)。
D.泥水平衡系统具有2种功能,其中一个是将刀盘切削下来的土体在泥水仓中混合后通过泵经管路输送至地面。
第10题
串级控制系统的主回路的特点是()。A.先调,粗调,快调B.先调,细调,快调C.后调,细调,慢调
串级控制系统的主回路的特点是()。
A.先调,粗调,快调
B.先调,细调,快调
C.后调,细调,慢调















