题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
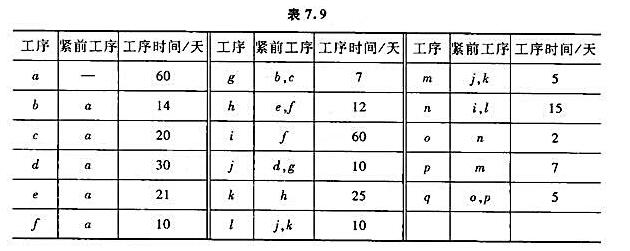
已知如表7.9所示的资料,要求:(1)绘制网络图;(2)计算各项时间参数;(3)确定关键路线。
已知如表7.9所示的资料,要求:(1)绘制网络图;(2)计算各项时间参数;(3)确定关键路线。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知如表7.9所示的资料,要求:(1)绘制网络图;(2)计算各项时间参数;(3)确定关键路线。
如果结果不匹配,请 联系老师 获取答案
 更多“已知如表7.9所示的资料,要求:(1)绘制网络图;(2)计算…”相关的问题
更多“已知如表7.9所示的资料,要求:(1)绘制网络图;(2)计算…”相关的问题
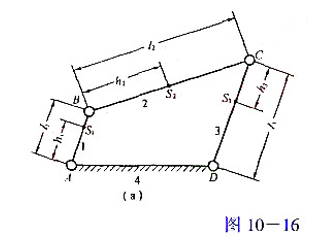
图10-16(a)所示铰链四杆机构中,已知构件1、2、3的长度为:l1=100mm,l2=300mm,l3=200mm;质量为:m1=1kg,m2=3kg、m3=2kg;其质心S1,S2,S3,的位置尺寸分别为:h1=75mm,h2=150mm,h3=120mm.今要求该机构达到惯性力完全平衡,试设计增加平衡质量的方案,并计算它们质径积的大小和方位.
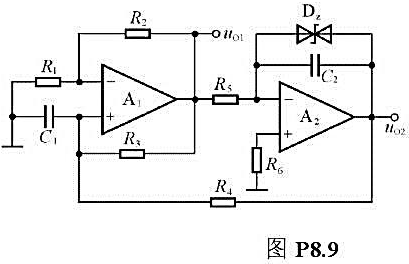
(1)试分析电路为什么能够满足产生正弦波振荡的条件;
(2)求出电路的振荡频率;
(3)画出uo1和uo2的波形图,要求表示出它们的相位关系,并分别求出它们的峰值.
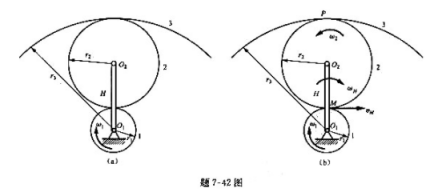
行星齿轮减速机构如题7-42图(a)所示。太阳轮1绕O1转动,带动行星轮2沿固定齿圈3滚动,行星轮2带动系杆H绕轴OH转动,从而实现了变速要求。已知各齿轮节圆半径分别为r1,r2。以及r3=r1+2r2,齿轮1和2的齿数分别为z1和z2,当齿轮1以角速度w1转动时,试求系杆角速度wH,以及传动比iH。
A.6.7百万元
B.7.9百万元
C.8.4百万元
D.9.2百万元
A.6.7百万元
B.7.9百万元
C.8.4百万元
D.9.2百万元
设V=<S,*>,其中S={a,b,c},*的运算表如表9-3所示。
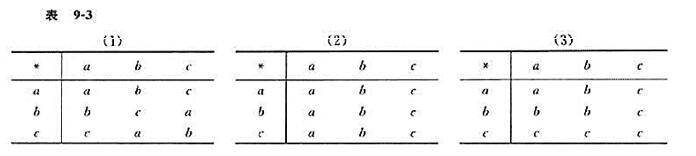
分别对以上每种情况讨论*运算的可交换性,幂等性,是否含有幺元以及S中的元素是否含有逆元。
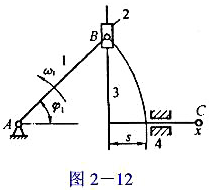
在图2-12所示正弦机构中,已知曲柄AB的等角速度为 1=20rad/s,lAB=100mm,
1=20rad/s,lAB=100mm, 1=45°,试用解析法求构件3的速度和加速度.
1=45°,试用解析法求构件3的速度和加速度.
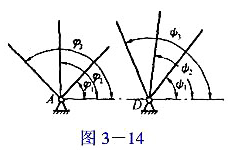
如图3-14所示,已知φ0= φ0=0°,原动件和从动件的三对对应位置为:
1=45°, 1=52°10'; φ2=90°,ψ2=82°10';φ3=135°,ψ3=112°10'.机架长度lCD=50mm.试用解析法设计此机构.
1=52°10'; φ2=90°,ψ2=82°10';φ3=135°,ψ3=112°10'.机架长度lCD=50mm.试用解析法设计此机构.