

 如果结果不匹配,请
如果结果不匹配,请 
 更多“前轮角阶跃输入下的横摆角速度波动的固有频率应该是()。”相关的问题
更多“前轮角阶跃输入下的横摆角速度波动的固有频率应该是()。”相关的问题
第2题
有一个闭环系统,其控制对象的传递函数为要求校正为典型Ⅱ型系统,在阶跃输入下系统超调量%≤30%(
有一个闭环系统,其控制对象的传递函数为要求校正为典型Ⅱ型系统,在阶跃输入下系统超调量%≤30%(
点击查看答案
有一个闭环系统,其控制对象的传递函数为

要求校正为典型Ⅱ型系统,在阶跃输入下系统超调量 %≤30%(按线性系统考虑)。试决定调节器结构,并选择其参数。
%≤30%(按线性系统考虑)。试决定调节器结构,并选择其参数。
第3题
设某伺服电动机的传递函数为其中Ω(s)为角速度,U(s)为输入电压。假设电动机在控制电压Uo作用
设某伺服电动机的传递函数为 其中Ω(s)为角速度,U(s)为输入电压。假设电动机在控制电压Uo作用下以ωo恒定速度转动,试求电压Uo突然降到零时,电动机的输出响应ω(t)。
其中Ω(s)为角速度,U(s)为输入电压。假设电动机在控制电压Uo作用下以ωo恒定速度转动,试求电压Uo突然降到零时,电动机的输出响应ω(t)。
第4题
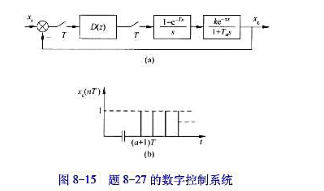
结构如图8-15(a)所示的数字控制系统。其中,τ-aT,a为正整数,T为采样周期。试设计数字控制器D(z),
结构如图8-15(a)所示的数字控制系统。其中,τ-aT,a为正整数,T为采样周期。
试设计数字控制器D(z),使系统在单位阶跃输入作用下,输出量Xt(nT)满足图8-15(b)所示的波形。

第11题
在进行四轮定位时,调整前轮定位参数的正确操作步骤是:()
A.外倾角→主销后倾角→前束角
B.主销后倾角→前束角→外倾角
C.主销后倾角→外倾角→前束角
D.前束角→外倾角→主销后倾角















