

 如果结果不匹配,请
如果结果不匹配,请 
 更多“③如图乙所示,保持杠杆水平位置平衡,测力计从a位置转到b位置…”相关的问题
更多“③如图乙所示,保持杠杆水平位置平衡,测力计从a位置转到b位置…”相关的问题
第1题
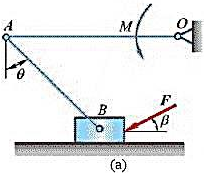
平面曲柄连杆滑块机构如图5-6a所示。OA=l,在曲柄OA上作用有1矩为M的力偶,OA水平。连杆AB与铅垂线的
夹角为日,滑块与水平面之间的摩擦因数为fs,不计重力,且tanθ>fs。求机构在图示位置保持平衡时F力的值。
点击查看答案
第2题
②在A点处挂 3 个钩码,应在 B 点挂()个钩码,才能使杠杆在水平位置平衡。 若将水平位置平衡的杠杆,两端同时去掉一个钩码,杠杆会
A.3个,仍然平衡
B.2个,沿顺时针旋转
C.2个,沿逆时针旋转
第4题
控制系统结构图如图6-2所示,其中,为了减少时间常数T2的影响,提高系统快速性,现采用位置反
控制系统结构图如图6-2所示,其中 ,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
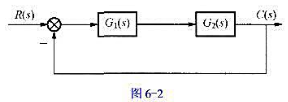
(1)画出校正后系统的结构图;
(2)确定位置反馈系数K;
(3)为了使校正后系统对于阶跃输入的稳态误差保持不变,K1应作何调整?
第5题
为了测石块的密度,某同学先用天平测石块的质量,所加砝码和游码在标尺上的位置如图甲所示,接着用量筒和水测石块的体积,其过程如图乙所示。下列判断错误的是()
A.石块的质量是 46.8g
B.石块的体积是 18cm3
C.石块的密度是 2.6×103kg/m3
D.若先测石块的体积,最终测得石块的密度会偏小
第6题
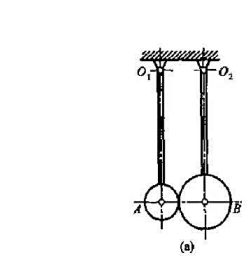
如图a所示,两复摆可分别绕水平轴O1和O2转动,两摆对此两轴的转动惯量各自为J1和J≇
如图a所示,两复摆可分别绕水平轴O1和O2转动,两摆对此两轴的转动惯量各自为J1和J2,金将摆A自铅垂位置拉至某一角度然后释放,当撞及静止的摆B时的角速度为ω0;设恢复因数为e,转轴O1及O2至碰撞直线的距离相等,求碰撞后两摆的角速度。
第7题
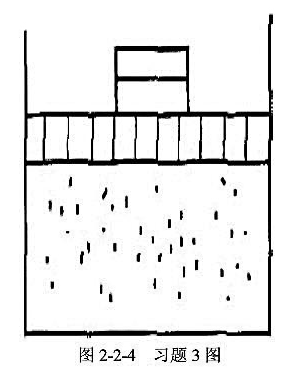
如图2-2-4所示的气缸,其内充以空气.气缸截面积为100cm²,活塞及其上重物的总重为200kg.活塞初始
位置距底面8cm.大气压力为0.1MPa,温度为25℃.气体与环境处于平衡状态.现把重物取走100kg,活塞将突然上升,最后重新达到平衡.若忽略活塞与气缸间的摩擦,气体与外界可充分换热,试求活塞上升的距离和气体与外界的换热量.
点击查看答案
第8题
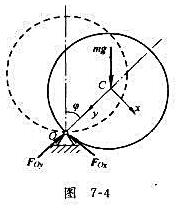
如图7-4所示,匀质圆盘质量为m,半径为r,可绕通过边缘且垂直于盘面的水平轴O转动。设圆盘从最高位
置无初速地开始绕轴O转动,求圆盘中心C与轴O的连线转过φ角时的角速度、角加速度以及轴的约束力。
点击查看答案
第9题
椭圆规机构如图a所示,滑块A、B可固定在杆MN的适当位置,滑块B可在水平槽内滑动,滑块A可在铅垂槽
内滑动。已知:MA=c,MB=b,杆MN的转动规律为φ=ωt,其中ω为常量。求1)杆端点M的运动方程及轨迹方程;2)点M在瞬时t=0及 时的速度和加速度。
时的速度和加速度。
点击查看答案
时的速度和加速度。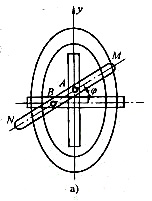
第10题
如图甲所示是一个弹簧振子的示意图,O是它的平衡位置,在B、C之间做简谐运动,规定向右为正方向。图乙是它的速度v随时间t变化的图象。下列说法中正确的是()
A.t=2 s时刻,振子的位置在O点左侧4 cm处
B.t=3 s时刻,振子的速度方向向左
C.t=4 s时刻,振子的加速度方向向右且为最大值
D.振子的周期为8 s
第11题
如图6所示,半径为R=0.4 m的圆弧形光滑轨道固定于竖直平面内,圆弧形轨道与光滑固定的水平轨道相切,可视为质点的质量均为m=0.5 kg的小球甲、乙用轻杆连接,置于圆弧形轨道上,小球甲与O点等高,小球乙位于圆心O的正下方.某时刻将两小球由静止释放,最终它们在水平面上运动.g取10 m/s2.则()
A.整个过程中轻杆对小球乙做的功为1 J
B.两小球由静止释放后速度大小相等,最终在水平面上运动的速度大小为4 m/s
C.小球甲下滑过程中重力对它做功的功率一直增大
D.小球甲下滑到圆弧形轨道最低点对轨道压力的大小为5 N















