

 如果结果不匹配,请
如果结果不匹配,请 
 更多“时间常数指当对象受到阶跃输入作用后,被控变量达到新稳态值的6…”相关的问题
更多“时间常数指当对象受到阶跃输入作用后,被控变量达到新稳态值的6…”相关的问题
第2题
控制系统结构图如图6-2所示,其中,为了减少时间常数T2的影响,提高系统快速性,现采用位置反
控制系统结构图如图6-2所示,其中 ,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
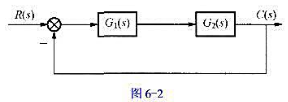
(1)画出校正后系统的结构图;
(2)确定位置反馈系数K;
(3)为了使校正后系统对于阶跃输入的稳态误差保持不变,K1应作何调整?
第4题
理想微分作用是指控制器的输出在阶跃信号的作用下,()。A.瞬间变成无穷大,其余时间为零B.输出为零
理想微分作用是指控制器的输出在阶跃信号的作用下,()。
A.瞬间变成无穷大,其余时间为零
B.输出为零
C.瞬间变成零,其余时间为无穷大

第8题
某比例积分控制器输入、输出范围均为4~20mA,若将比例度设为100%、积分时间设为2min、稳态时输出调为5mA,某时刻,输入阶跃增加0.2mA,试问经过5min后,输出将由5mA变化到多少?
第11题
某被控对象的传递函数如图2-9-8所示。设计该系统的一个状态观测器,使其极点位于-6,-6。
某被控对象的传递函数如图2-9-8所示。
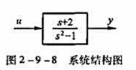
设计该系统的一个状态观测器,使其极点位于-6,-6。
















