

 如果结果不匹配,请
如果结果不匹配,请 
 更多“垂直线性良好的仪器在探测平底孔时,孔面积每增加一倍,回波高度…”相关的问题
更多“垂直线性良好的仪器在探测平底孔时,孔面积每增加一倍,回波高度…”相关的问题
第1题
在声程大于3N时,直径增加一倍,平底孔的反射声压提高()DB,长横孔的反射声压提高()DB。
在声程大于3N时,直径增加一倍,平底孔的反射声压提高()DB,长横孔的反射声压提高()DB。
点击查看答案
第5题
一项实验的指导语为: “请你注意仪器窗口内的两根直棍,其中一个是固定的标准刺激,一个是可移动的比较刺激。请你按手中的两个按钮(前、后方向),调节比较刺激,直到你感觉两根直棍在与你视线垂直的同一个平面上。”该实验程序测量的是()。
A.运动知觉
B.速度知觉
C.深度知觉
D.方位知觉
第7题
使用37°探头探测钢轨实物试块螺孔37°上裂纹时,在螺孔反报警门内应有螺孔反射波和()。
使用37°探头探测钢轨实物试块螺孔37°上裂纹时,在螺孔反报警门内应有螺孔反射波和()。
点击查看答案
第8题
求下列线性变换在所指定基下的矩阵:1)在P3中,,在基ε1=(1,0,0),ε2=(0,1,0),ε3⌘
求下列线性变换在所指定基下的矩阵:
1)在P3中, ,
, 在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
2)[O,ε1,ε2]是平面上一直角坐标系,是平面上的向量对第一和第三象限角的平分线的垂直投影, 是平面上的向量对ε2的垂直投影,求
是平面上的向量对ε2的垂直投影,求 在基ε1,ε2下的矩阵;
在基ε1,ε2下的矩阵;
3)在空间P[x]n中,设变换为f(x)→f(x+1)-f(x)。求在基
下的矩阵;
4)六个函数
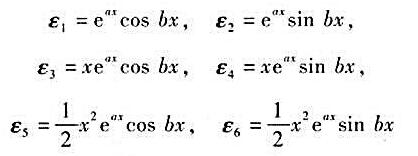
的所有实系数线性组合构成实数域上一个六维线性空间,求微分变换 在基εi(i=1,2,...,6)下的矩阵;
在基εi(i=1,2,...,6)下的矩阵;
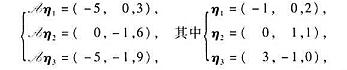
5)已知P3中线性变换在基η1=(-1,1,1),η2=(1,0,-1),η3=(0,1,1)下的矩阵是

求在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
6)在P3中,定义如下:
求在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
7)同上,求在η1,η2,η3下的矩阵。
第9题
水泥土防渗桩(墙)体的防渗施工要求不包括:()A.桩机有深度计可以精确测量桩深,有调平装置,确保
水泥土防渗桩(墙)体的防渗施工要求不包括:()
点击查看答案
A.桩机有深度计可以精确测量桩深,有调平装置,确保墙体竖直;比重计保证浆液水灰比符合要求;定期检查搅拌头直径确保墙体宽度。
B.搅拌头有“裹土”现象时,用宽距翼片搅拌头并结合高转速施工,从而使墙体搅拌均匀,无水泥“结核”。
C.水灰比可根据经验来确定,不进行修正。
D.严格按照轴线位置、设计深度、桩径、搭接长度及垂直度要求进行施工,要求误差小于±10cm,桩径偏差不大于4%,孔位偏差小于5cm,垂直度偏差小于0.5%。















