

 如果结果不匹配,请
如果结果不匹配,请 
 更多“移动副的限制了沿某一轴线的移动和绕平面内任意一点的转动。()”相关的问题
更多“移动副的限制了沿某一轴线的移动和绕平面内任意一点的转动。()”相关的问题
第2题
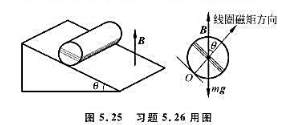
斜面上放有一木制圆柱,圆柱质量m为0.25kg,半径为R,长10.10m。在圆柱上顺着圆柱长度方向绕有N=1
0匝的导线(图5.25),圆柱体的轴线位于导线回路的平面内,斜面与水平方向成倾角θ,处于一匀强磁场中,磁感应强度为0.5T,沿竖直方向朝上。如果绕组的平面与斜面平行,问通过回路的电流至少要有多大,圆柱才不致沿斜面向下滚动?
点击查看答案
第6题
下列关于固定端支座约束性能的说法中,正确的是()。
A.只能限制沿水平方向和沿铅垂方向移动
B.只能限制指定方向移动和沿指定方向相垂直方向移动
C.只能限制沿指定方向移动和转动
D.限制沿任何方向的移动和转动
第7题
虚约束发生的场合”重复移动副“是指()
A、两个构件间构成多个移动副,其导路互相平行
点击查看答案
B、在机构的运动过程中,如两个构件上某两点之间的距离始终保持不变,在这种情况下,若用一个构件将该两点用转动副连接起来,则该构件及形成的个两转动副所引入的约束为虚约束
C、机构中某些不影响机构运动传递的重复部分所引入的约束
D、两个构件间构成多个转动副,其轴线相互重合时,只有一个转动副起作用,其它副均为虚约束
第8题
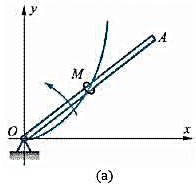
图8-16a所示小环M沿杆OA运动,杆OA绕轴O转动,从而使小环在Oxy平面内具有如下运动方程:求t=1s时,小
图8-16a所示小环M沿杆OA运动,杆OA绕轴O转动,从而使小环在Oxy平面内具有如下运动方程:

求t=1s时,小环M相对于杆OA的速度和加速度,杆OA转动的角速度及角加速度。
第10题
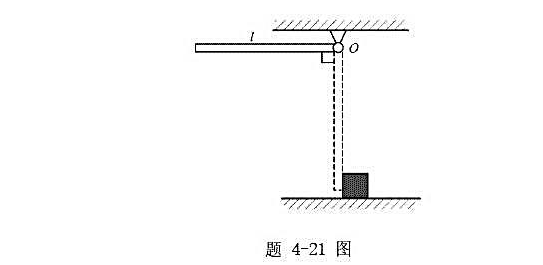
如图所示,长为l、质量为m的均质杆,可绕点0在竖直平面内转动,令杆至水平位置由静止摆下,在竖直
位置与质量为一的物体发生完全非弹性碰撞,碰撞后物体沿摩擦因数为μ的水平面滑动,试求此物体滑过的距离S。
点击查看答案
第11题
头架和尾座的中心连线对工作台移动方向在垂直平面内的平行度误差,会使磨外圆时产生腰鼓形。()
头架和尾座的中心连线对工作台移动方向在垂直平面内的平行度误差,会使磨外圆时产生腰鼓形。()















