题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
调制信号vf(t)=cos(2π×400t)V对载波vc(t)=4cos(2π×25×106t)V进行角度调制。若最大频偏为△f=15kHz
调制信号vf(t)=cos(2π×400t)V对载波vc(t)=4cos(2π×25×106t)V进行角度调制。若最大频偏为△f=15kHz
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
调制信号vf(t)=cos(2π×400t)V对载波vc(t)=4cos(2π×25×106t)V进行角度调制。若最大频偏为△f=15kHz
如果结果不匹配,请 联系老师 获取答案
 更多“调制信号vf(t)=cos(2π×400t)V对载波vc(t…”相关的问题
更多“调制信号vf(t)=cos(2π×400t)V对载波vc(t…”相关的问题
已知常规调幅信号s(t)=[10+6sin(2π×100t)cos(2π×1000t)V。试指出:
(1)载波振幅A0和载波频率fc;
(2)调制信号振幅Am和频率fm;
(3)已调信号的平均功率PAM;
(4)已调信号的边带功率Ps ;
(5)画出信号的频谱图.
获得幅度已调信号,假设f(t)带限,即F(ω)=0,|ω|>ω0。
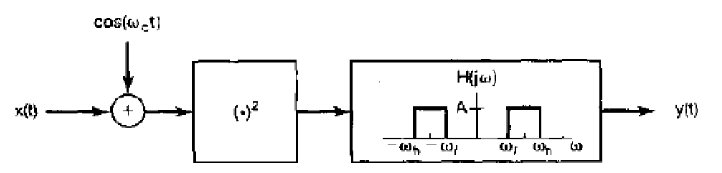 (1)试确定带通滤波器的参数A、ω1和ω2,使得y(t)是用f(t)进行幅度调制的结果(即y(t)=f(t)cos(ωct));
(1)试确定带通滤波器的参数A、ω1和ω2,使得y(t)是用f(t)进行幅度调制的结果(即y(t)=f(t)cos(ωct));
(2)请给出对ωc和ωm必要的限制。
已知调幅波表示式u(t)=[2+cos(2π×100t)]cos(2π×104t)V,试画出它的波形和频谱图,求出频带宽度。若已知RL=1Ω,试求载波功率、边频功率、调幅波在调制信号一个周期内的平均功率。
A.150Hz
B.300Hz
C.300πHz
D.400Hz
A.uFM(t)=UCcos(ωCt+mfsinΩt)
B.uFM(t)=UCcos(ωCt+mpcosΩt)
C.uFM(t)=UC(1+mpcosΩt)cosωCt
D.uFM(t)=kUΩUCcosωCtcosΩt
A.uDSB(t)=UCcos(ωCt+masinΩt)
B.uDSB(t)=UCcos(ωCt+macosΩt)
C.uDSB(t)=UC(1+macosΩt)cosωCt
D.uDSB(t)=kUΩUCcosωCtcosΩt
A.uFM(t)=UCcos(ωCt+mfsinΩt)
B.uFM(t)=UCcos(ωCt-mfcosΩt)
C.uFM(t)=UC(1+mfsinΩt)cosωCt
D.uFM(t)=kUΩUCcosωCtsinΩt
A.uPM(t)=UCcos(ωCt+mPsinΩt)
B.uPM(t)=UCcos(ωCt-mPcosΩt)
C.uPM(t)=UC(1+mPsinΩt)cosωCt
D.uPM(t)=kUΩUCcosωCtsinΩt
A.uPM(t)=UCcos(ωCt+mPsinΩt)
B.uPM(t)=UCcos(ωCt-mPcosΩt)
C.uPM(t)=UC(1+mPsinΩt)cosωCt
D.uPM(t)=kUΩUCcosωCtsinΩt
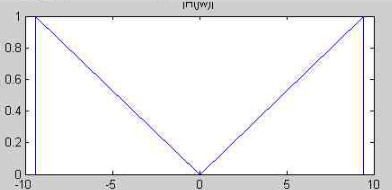
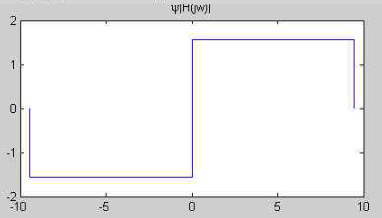
下图是一个连续时间滤波器的频率响应H(ω),该系统称之为低通微分器。若输入信号x(t)=cos(2πt+θ),求滤波器的输出y(t)。