题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
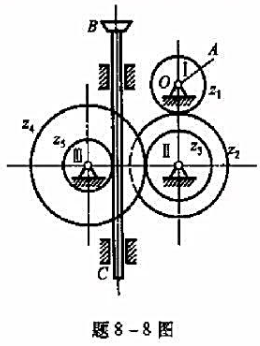
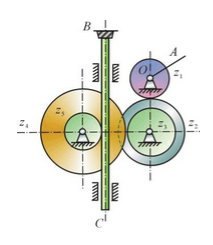
图示仪表机构中,齿轮1、2、3和4的齿数分别为:z1=6、z2=24、z3=8、z4=32,齿轮5的半径为40mm.如齿条B移动10mm,求指
图示仪表机构中,齿轮1、2、3和4的齿数分别为:z1=6、z2=24、z3=8、z4=32,齿轮5的半径为40mm.如齿条B移动10mm,求指针A所转过的角度φ.
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
图示仪表机构中,齿轮1、2、3和4的齿数分别为:z1=6、z2=24、z3=8、z4=32,齿轮5的半径为40mm.如齿条B移动10mm,求指针A所转过的角度φ.
如果结果不匹配,请 联系老师 获取答案
 更多“图示仪表机构中,齿轮1、2、3和4的齿数分别为:z1=6、z…”相关的问题
更多“图示仪表机构中,齿轮1、2、3和4的齿数分别为:z1=6、z…”相关的问题
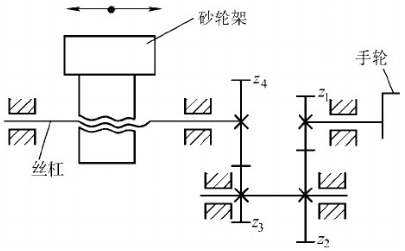
件。其中齿轮1、2、3及4组成定轴轮系,丝杠5与齿轮4相固联,丝杠转动时带动与螺母固联的砂轮架移动。已知丝杠为右旋单线螺纹,螺距P=3mm,各齿轮齿数Z1=28,Z2=56,Z3=38,Z4=50。试求当手轮按图示方向转一圈时,砂轮架的移动距离L和方向。
A.1和2
B.1和3
C.2 和4
D.3和4
下图所示为一蜗杆-圆柱斜齿轮-直齿锥齿轮三级传动,已知蜗杆为主动,且按图示方向转动。试在图中绘出:
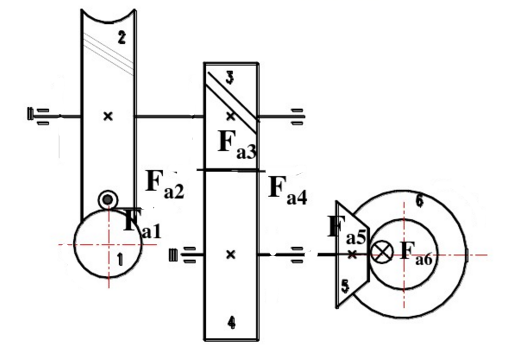
(1)各轮转向。
(2)使Ⅱ、Ⅲ轴轴承所受轴承向力较小时的斜齿轮轮齿的旋向。
(3)斜齿轮3、4在啮合点所受各分力Ft3、Fr3、Fa3及Ft4、Fr4、Fa4的方向。
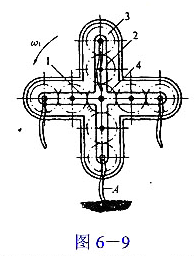
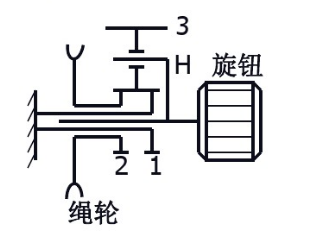
如图所示为收音机短波调谐微动机构。已知齿数z1=99,z2=100。试问当旋钮转动一圈时,齿轮2转过多大角度(齿轮3为宽齿,同时与轮1、2相啮合)?
(1)作出啮合时齿轮的分度圆和齿条的分度线;
(2)作出齿轮的齿顶圆和齿顶线;
(3)作出齿轮的基圆;
(4)作出齿轮与齿条传动的啮合线;
(5)作出其啮合节点;
(6)作出真实啮合线段B1B2;
(7)作出齿条齿廓上的工作段(参与啮合的一段齿廓);
(8)作出用齿条形刀具切制该齿轮时,为保证不根切,齿条刀具的最小变位距离xm.
A.(1)180mm;(2)186mm;(3)60mm
B.(1)60mm;(2)66mm;(3)120mm
C.(1)60mm;(2)186mm;(3)80mm
D.(1)180mm;(2)66mm;(3)240mm
图示减速器中,1为蜗杆,2为蜗轮,3,4均为斜齿轮,主动轴蜗杆为顺时针旋转,蜗轮为右旋,则蜗杆螺旋线方向为(),若希望蜗轮2和小齿轮3的轴向力能抵消一部分,则齿轮3的螺旋线方向为(),齿轮4的轴向力方向为()。