
 证明:
证明:
 ,其中h>0.
,其中h>0.
 如果结果不匹配,请
如果结果不匹配,请 
 更多“试由证明:(1)(2),其中h>0.”相关的问题
更多“试由证明:(1)(2),其中h>0.”相关的问题
第1题
设f(x)∈P[x],degf(x)>0.试证下面三个条件等价:1)f(x)=cp(x)m,p(x)不可约,c∈P,c≠0.2)Vg(x)∈P[x],或((x),g(x))=1,或存在k使得f(x)|g(x)k.3)若f(x)g(x)h(x),则f(x)lg(x)或者存在k使得f(x)|h(x)k.

第3题
(1)设f:A→B.定义A上的关系R,使得aRb当且仅当f(a)=f(b).证明R是A上的等价关系.(2)称由上述等价关系R导出的A上的划分为A的R商集,记作A/R.如下定义从商集A/R到B的关系g:任取C∈A/R,b∈B,∈g当且仅当存在a∈A,c=[a]且f(a)=b.试证明f为满射时g为一双射函数.
第4题
设F [f(t)]= F(ω), 试证明:1) f(t)为实值函数的充要条件是F(-ω)= ;2) f(t)为虚值函数的充要条
设F [f(t)]= F(ω), 试证明:
1) f(t)为实值函数的充要条件是F(-ω)= ;
;
2) f(t)为虚值函数的充要条件是F(-ω)=- .
.
第6题
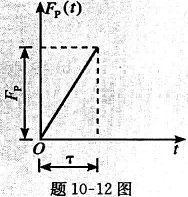
设有一个自振周期为T的单自由度体系,承受图示突加荷载作用。试:(1)求任意时刻t的位移y(t).(2)
设有一个自振周期为T的单自由度体系,承受图示突加荷载作用。试:
(1)求任意时刻t的位移y(t).
(2)证明:当τ<0.5T时,最大位移发生在时刻t>τ(即卸载后);当t>0.5T时,最大位移发生在t<τ(即卸载前).
(3)当τ=0.1T,τ=0.2T,τ=0.3T,τ=0.5T时,求最大位移ymax与静位移 的比值。
的比值。
(4)证明: 的最大值为2;当τ<0.1T时,可按瞬时冲量计算,误差不大。 分析 t为荷载持续时间,τ为积分变量。
的最大值为2;当τ<0.1T时,可按瞬时冲量计算,误差不大。 分析 t为荷载持续时间,τ为积分变量。
第7题
质点作直线运动,其位移s与时间t的关系是s=3t2+1,其中t的单位是s,s的单位是cm。试求:(1)t=4到t=5之间的平均速度;(2)t=4到t=4.1之间的平均速度;(3)t=4的瞬时速度。
第8题
一个因果的线性移不变系统的系统函数为H(z)=(z-1</sup>+az-1</sup>);其中a为实数。(1)问能使系统稳定的a值的范围?(2)若0<a<1,画出零极点图,并注明收敛域。(3)证明这个系统是全通函数,即其频率响应的幅度为常数(这里,此常数为1)。
第9题
设是两个能控且能观的系统(1) 试分析由所组成的串联系统的能控性和能观性,并写出其传递函数;(
设 是两个能控且能观的系统
是两个能控且能观的系统

(1) 试分析由 所组成的串联系统的能控性和能观性,并写出其传递函数;
所组成的串联系统的能控性和能观性,并写出其传递函数;
(2) 试分析由 所组成的并联系统的能控性和能观性,并写出其传递函数。
所组成的并联系统的能控性和能观性,并写出其传递函数。
第10题
问题描述:设p是奇素数,1≤x≤p-1,如果存在一个整数y(1≤y≤p-1),使得x=y2(modp),则称y是x的
问题描述:设p是奇素数,1≤x≤p-1,如果存在一个整数y(1≤y≤p-1),使得x=y2(modp),则称y是x的模p平方根.例如,63是55的模103平方根.试设计一个求整数x的模p平方根的拉斯维加斯算法.算法的计算时间应为logp的多项式.
算法设计:设计一个拉斯维加斯算法,对于给定的奇素数p和整数x,计算x的模p平方根.
数据输入:由文件input.txt给出输入数据.第1行有2个正整数p和x.
结果输出:将计算的x的模p平方根输出到文件output.txt.当不存在x的模p平方根时,输出0.

第11题
控制系统如图4-29所示,其中(1)当Wc=kg时,由所绘制的根轨迹证明系统总是不稳定的。(2)
控制系统如图4-29所示,其中
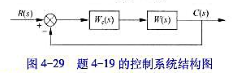
(1)当Wc=kg时,由所绘制的根轨迹证明系统总是不稳定的。
(2)当 时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。















