如果结果不匹配,请
如果结果不匹配,请 
 更多“稳态误差与系统自身的结构和参数、输入列的形式、采样周期T有关…”相关的问题
更多“稳态误差与系统自身的结构和参数、输入列的形式、采样周期T有关…”相关的问题
第1题
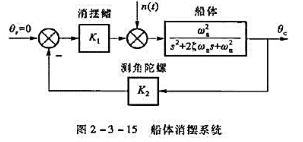
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
第2题
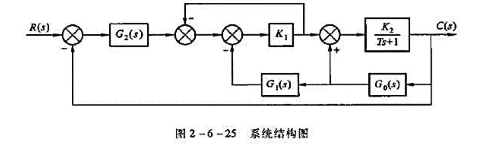
系统结构图如图2-6-25所示。图中K1、K2、T均大于零,G0(s)的特性有一定的变化。若要求
系统结构图如图2-6-25所示。图中K1、K2、T均大于零,G0(s)的特性有一定的变化。若要求
点击查看答案
G0(s)的特性变化不影响输出c(t),且系统在r(t)=t作用下无稳态误差。试设计G1(s)、G2(s),并说明G1(s)、G2(s)参数应满足的条件。
第3题
已知线性定常离散系统结构如图8-5所示,r(t)为单位阶跃函数,采样周期T=1s,试设计一个数字控制器
已知线性定常离散系统结构如图8-5所示,r(t)为单位阶跃函数,采样周期T=1s,试设计一个数字控制器D(z),使系统为无稳态误差的最少拍系统。(e-1=0.368, e-2=0.136)

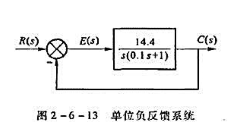
 ,求当输入量为
,求当输入量为 sinωt时,控制系统的稳态误差。
sinωt时,控制系统的稳态误差。第6题
离散系统结构图如图所示,采样周期T=0.2s。(1)判断系统的稳定性;(2)当r(t)=t时,求系统的稳态误差
离散系统结构图如图所示,采样周期T=0.2s。
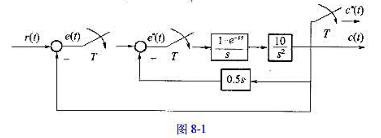
(1)判断系统的稳定性;
(2)当r(t)=t时,求系统的稳态误差e*(∞)。
第7题
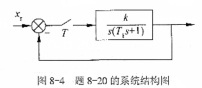
图8-4所示系统,令T=1,要求在xc(t)=t作用下的稳态误差ess=0.25T ,试确定系统稳定时T
图8-4所示系统,令T=1,要求在xc(t)=t作用下的稳态误差ess=0.25T ,试确定系统稳定时Ti的取值范围。
第8题
某单位反馈系统在输入信号xi(t)=1+t的作用下,输出响应xo(t)=t,试求该系统的开环传递函数和稳态误差。
某单位反馈系统在输入信号xi(t)=1+t的作用下,输出响应xo(t)=t,试求该系统的开环传递函数和稳态误差。
点击查看答案