题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
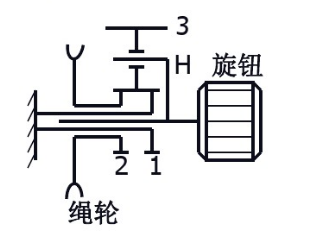
如图所示为收音机短波调谐微动机构。已知齿数z1=99,z2=100。试问当旋钮转动一圈时,齿轮2转过多大角度(齿轮3为
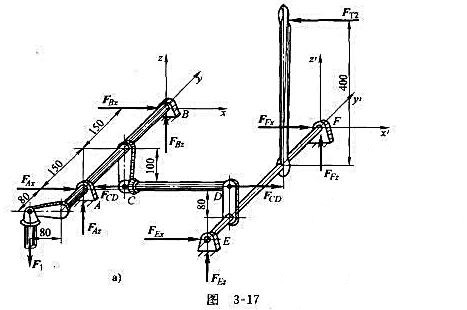
如图所示为收音机短波调谐微动机构。已知齿数z1=99,z2=100。试问当旋钮转动一圈时,齿轮2转过多大角度(齿轮3为宽齿,同时与轮1、2相啮合)?
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如图所示为收音机短波调谐微动机构。已知齿数z1=99,z2=100。试问当旋钮转动一圈时,齿轮2转过多大角度(齿轮3为宽齿,同时与轮1、2相啮合)?
如果结果不匹配,请 联系老师 获取答案
 更多“如图所示为收音机短波调谐微动机构。已知齿数z1=99,z2=…”相关的问题
更多“如图所示为收音机短波调谐微动机构。已知齿数z1=99,z2=…”相关的问题
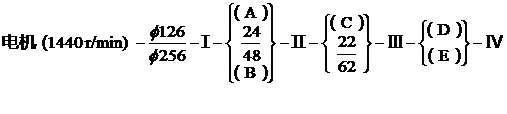
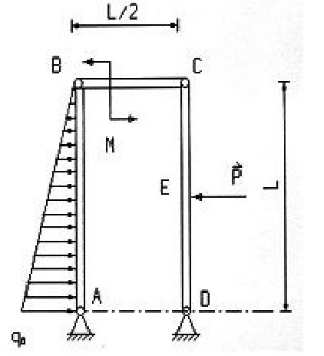
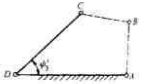
如图所示平面机构。已知:AB=CD=l=3m,BC=l/2,各杆自重不计,q0=500N/m,M=300N·m。求为保持机构平衡,需在CD杆中点E作用多大的力F,及A、D处约束反力大小。
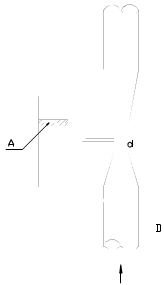
如图所示,一文丘里管推动控制机构的活塞A上升。已知活塞直径为D,自重为N,文丘里管直径为D1,喉部直径为D2,问文丘里管中流体体积流量为多大时,可将活塞托起?(忽略流体自重)。
如图所示,现欲设计一铰链四杆机构,设已知摇杆CD的长lCD=75mm,行程速比系数K=1.5,机架AD的长度为lAD=100mm,摇杆的一个极限位置与机架间的夹角为 ,试求曲柄的长度lAB和连杆的长度lBC(有两组解)。
,试求曲柄的长度lAB和连杆的长度lBC(有两组解)。
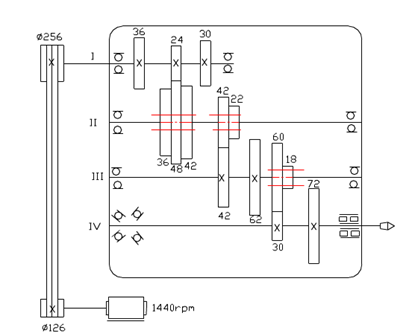
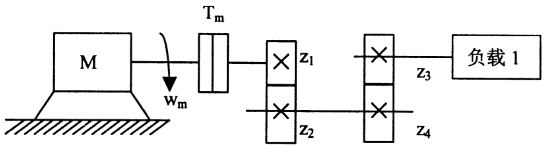
图所示机电动传系统,减速机构为两级减速箱,已知齿轮齿数之比Z2/Z1=3,Z4/Z3=5,减速机构的效率ηc=0.92,各齿轮的飞轮惯量分别为GD12=29.4N·m2,GD22=78.4N·m2,GD32=49N·m2,GD42=196N·m2,电动机的飞轮惯量GDM2=294N·m2,负载的飞轮惯量GDL2=450.8N·m2,负载转矩T'L=470.4N·m2,试求:
(1) 折算到电动机轴上的负载转矩TL;
(2) 折算到电动机轴上系统的飞轮惯量GDZ2。
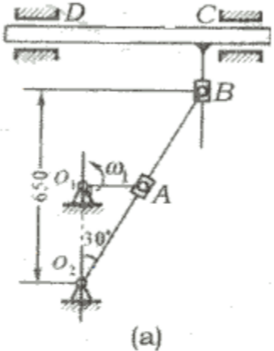
牛头刨床的机构如图所示.已知O1A=200mm,匀角速度ω1=2rad/s.求图示位置滑杆CD的速度和加速度.
A.GPS信号是通过GPS天线来搜索获取的,线越长搜索的信号就越多
B.M即调频,习惯上用FM来指一般的调频广播,事实上FM也是一种调制方式,即使在短波范围内的27-30MHz之间
C.4G车机可以通过内置4G网络模块直接搜索4G信号
D.收音机调频信号需要通过GPS天线来搜索