题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知Ackerman函数定义如下:(1)根据定义,写出它的递归求解算法;(2)利用栈,写出它的非递归求解
已知Ackerman函数定义如下:(1)根据定义,写出它的递归求解算法;(2)利用栈,写出它的非递归求解
已知Ackerman函数定义如下:

(1)根据定义,写出它的递归求解算法;
(2)利用栈,写出它的非递归求解算法。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知Ackerman函数定义如下:
(1)根据定义,写出它的递归求解算法;
(2)利用栈,写出它的非递归求解算法。
如果结果不匹配,请 联系老师 获取答案
 更多“已知Ackerman函数定义如下:(1)根据定义,写出它的递…”相关的问题
更多“已知Ackerman函数定义如下:(1)根据定义,写出它的递…”相关的问题
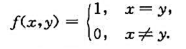
已知定义在[2,π]上的函数f(x)=logαx的最大值比最小值大1,则α=()
A.π/2
B.2/π
C.2或π
D.π/2或2/π
设A={x|x∈R∧x≠0,1}。在A上定义6个函数如下:
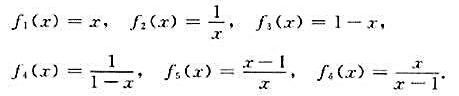
V=<S,°>,其中S={f1,f2,...,f6},°为函数的复合.。
(1)给出V的运算表。
(2)说明V的幺元和所有可逆元素的逆元:
求下列线性变换在所指定基下的矩阵:
1)在P3中, ,
, 在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
2)[O,ε1,ε2]是平面上一直角坐标系,是平面上的向量对第一和第三象限角的平分线的垂直投影, 是平面上的向量对ε2的垂直投影,求
是平面上的向量对ε2的垂直投影,求 在基ε1,ε2下的矩阵;
在基ε1,ε2下的矩阵;
3)在空间P[x]n中,设变换为f(x)→f(x+1)-f(x)。求在基
下的矩阵;
4)六个函数
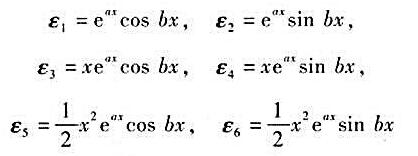
的所有实系数线性组合构成实数域上一个六维线性空间,求微分变换 在基εi(i=1,2,...,6)下的矩阵;
在基εi(i=1,2,...,6)下的矩阵;
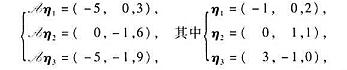
5)已知P3中线性变换在基η1=(-1,1,1),η2=(1,0,-1),η3=(0,1,1)下的矩阵是

求在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
6)在P3中,定义如下:
求在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵;
7)同上,求在η1,η2,η3下的矩阵。
已知第IV类部分响应基带传输系统的局部方框图如下:
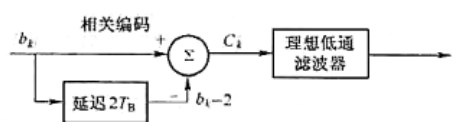
图中,Ty为码元时间间隔,理恕低通滤波器传输函数H(w)为
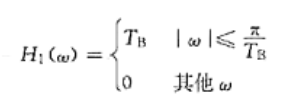
(1)试求该部分响应基带传输系统局部方框图的单位冲激响应和传输函数;
(2)在实际应用中,为了消除错误传播,需在相关编码器前增加预编码器,试写出该预编码公式;
(3)若预编码器输入二进制信号序列ak取值为100111001.试画出bk,bk-2和ck的对应值。

编写一个能对任意mxn阶矩阵进行转置运算的函数Transpose() 。
 式中:T≥0为时滞常数。在Matlab中提供了命令dde23来直接求解时滞微分方程。其调用格式为801=dde23(ddefun,lags,history,tspan,options),
式中:T≥0为时滞常数。在Matlab中提供了命令dde23来直接求解时滞微分方程。其调用格式为801=dde23(ddefun,lags,history,tspan,options),
其中,ddfun为描述时滞微分方程的函数;lags为时滞常数向量;history为描述t≤to时的状态变量值的函数;tspan为求解的时间区间;options为求解器的参数设置。该函数的返回值sol是结构体数据,其中sol.x成员变量为时间向量l,sol.y成员变量为各个时刻的状态向量构成的矩阵,其每一个行对应着一个状态变量的取值。求解如下时滞微分方程组:
 已知,在i≤0时,x(t)=5,x2(t)=0,x(1)=1,试求该方程组在[0,40]上的数值解。
已知,在i≤0时,x(t)=5,x2(t)=0,x(1)=1,试求该方程组在[0,40]上的数值解。
下列函数在各自定义域中为增函数的是
A.y=1+2x
B.y=1—x
C.y=1+x2
D.y=1+Z-x








 定义函数
定义函数