题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
在图示各机构中,设已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动,试以图解法求机构在图示位置时构件3上C点的速度及加速度(比例尺任选)。
在图示各机构中,设已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动,试以图解法求机构在图示位置时构件3上C点的速度及加速度(比例尺任选)。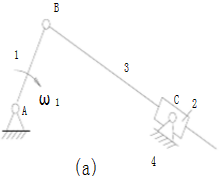
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
 更多“在图示各机构中,设已知各构件的尺寸,原动件1以等角速度ω1顺…”相关的问题
更多“在图示各机构中,设已知各构件的尺寸,原动件1以等角速度ω1顺…”相关的问题
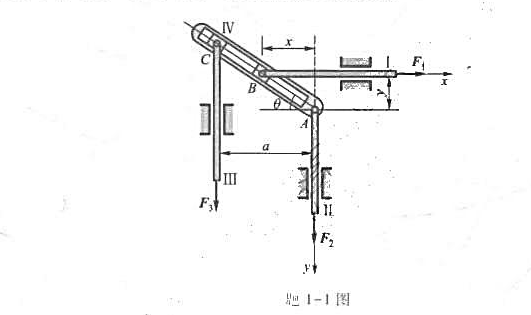
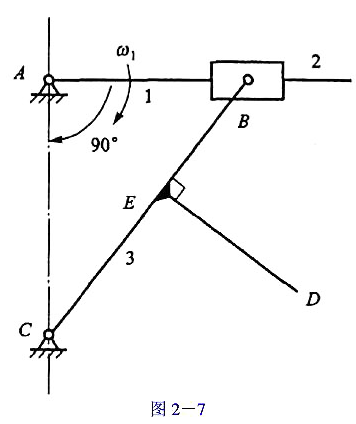
图2-7所示机构中,若已知构件1以等角速度 1=10rad/s回转,机构各构件尺寸为lBC=43mm,lAC=35mm,且AB⊥AC,CB⊥ED,lBE=lCE=lED.试用相对运动图解法求构件3的角速度 3和角加速度a3,以及D点的速度vD和加速度aD.
1=10rad/s回转,机构各构件尺寸为lBC=43mm,lAC=35mm,且AB⊥AC,CB⊥ED,lBE=lCE=lED.试用相对运动图解法求构件3的角速度 3和角加速度a3,以及D点的速度vD和加速度aD.
A.①②③④⑤⑥⑦
B.③①②④⑤⑥⑦
C.⑤⑥①②③④⑦
D.⑤⑥①②⑦③④
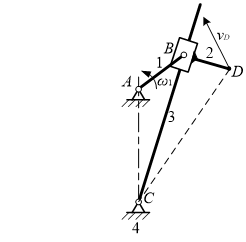
A.D点的速度方向应平行于BC方向,指向向上(图中未示出)
B.滑块2上的D点绕C点转动, 其D点的速度方向为垂直于CD连线(图中虚线),指向为逆时针方向;
C.如题图上vD所示方向
D.因缺条件,D点的速度方向无法作图确定







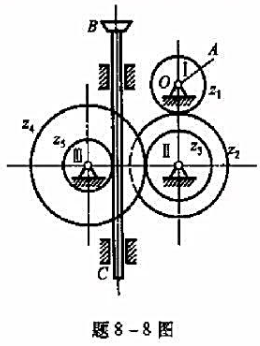
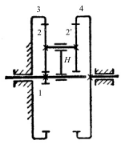
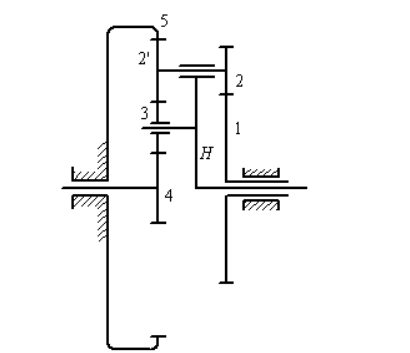
 电动机转速为960r/min,试求输出轴的转速n4?
电动机转速为960r/min,试求输出轴的转速n4?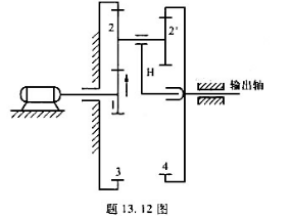
 试求传动比i14。
试求传动比i14。