题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
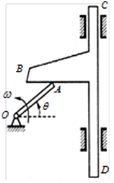
题6-14图(a)所示机构,滑槽OA可绕O轴定轴转动,BC杆可沿导槽水平平移。图示瞬时BC杆的速度,加速度
题6-14图(a)所示机构,滑槽OA可绕O轴定轴转动,BC杆可沿导槽水平平移。图示瞬时BC杆的速度,加速度
分别为v,a。已知h,θ。试求滑槽OA的角速度和角加速度。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
分别为v,a。已知h,θ。试求滑槽OA的角速度和角加速度。
如果结果不匹配,请 联系老师 获取答案
 更多“题6-14图(a)所示机构,滑槽OA可绕O轴定轴转动,BC杆…”相关的问题
更多“题6-14图(a)所示机构,滑槽OA可绕O轴定轴转动,BC杆…”相关的问题
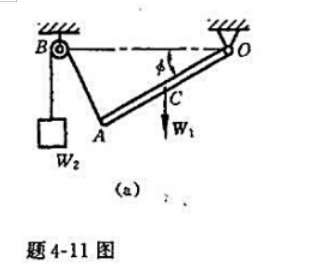
题4-11图(a)所示均匀细杆OA的重量为W1,可绕光滑铰链O转动。杆端连接细绳,细绳跨过光滑小滑轮B而悬挂一重物,其重量为W2。已知OA=OB=l,且OB成水平;滑轮尺寸略去不计,求平衡时细杆与水平线所成的角度φ,再设W1=3W2,试计算平衡时φ角的值。
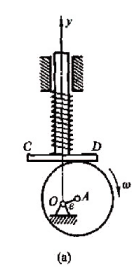
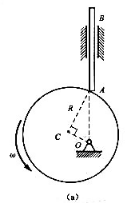
杆OA绕O轴逆时针转动,均质圆盘沿OA杆纯滚动。已知圆盘的质量m=20kg,半径R=100mm。在题9-4图(a)所示位置时,OA杆的倾角为30,其角速度为w1=1rad/s,圆盘相对OA杆转动的角速度v2=4rad/s, B= mm,试求圆盘的动量。
mm,试求圆盘的动量。

半径为R=3e,图示瞬时,OC⊥CA,且O,A,B三点共线。求从动杆AB的速度和加速度。
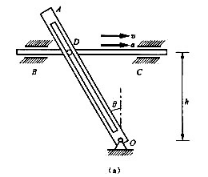
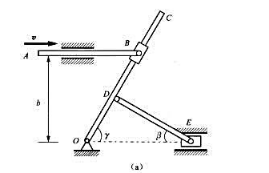
题7-37图(a)所示平面机构中,杆AB以匀速v沿水平方向运动,套筒B与杆AB的端点铰接,并套在绕轴O转动的杆OC上,可沿杆滑动。已知AB和OE两平行线间的垂直距离为b,试求图示位置γ=60°,β=30°。OD=BD时,杆OC的角速度和角加速度,以及滑块E的速度和加速度。
在图6-14所示操舵装置的周转轮系中,已知齿数z1=z4.(1)自动操舵时刹住舵轮A,这时复式电动机开动,执行电动机再通过行星轮系1-2-3-4-5及一些其他机构进行操舵,求传动比i15;(2)手动操舵时用控制杆锁住复式电动机,故轮1不动,这时松开舵轮A,并用它通过行星轮系4-3-2-1-5及一些其他机构进行操舵,求传动比i45.
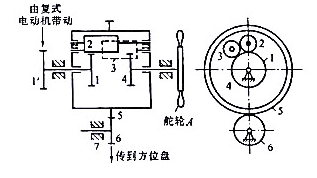
图6-14
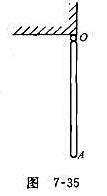
质量为m,长为2l的均质杆OA绕水平固定轴O在铅垂面内转动,如题9-12图(a)所示。已知在图示位置杆的角速度为角加速度为a。试求此时杆在O轴的约束力。

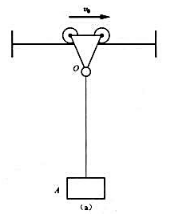
跑车通过长为l的绳索OA吊着质量为m的重物A以匀速度v0沿水平方向运动,如题8-8图(a)所示。由于突然刹车,重物因惯性绕悬挂点O向前摆动,试求刹车前和刹车后绳子的拉力。
A.0.173m/s, 0.05m/s2
B.0.1m/s, 0.05m/s2
C.0.173m/s, 0.087m/s2
D.0.1m/s, 0.087m/s2
两均质杆OA和AB质量为m,长为l,连接于A。题9-6图(a)所示位置时,OA杆的角速度为w。AB杆相对OA杆的角速度亦为w。试求此瞬时系统的动量。